
Visuo-taktile Sensorik für robotergestützte Montage von Bauteilen
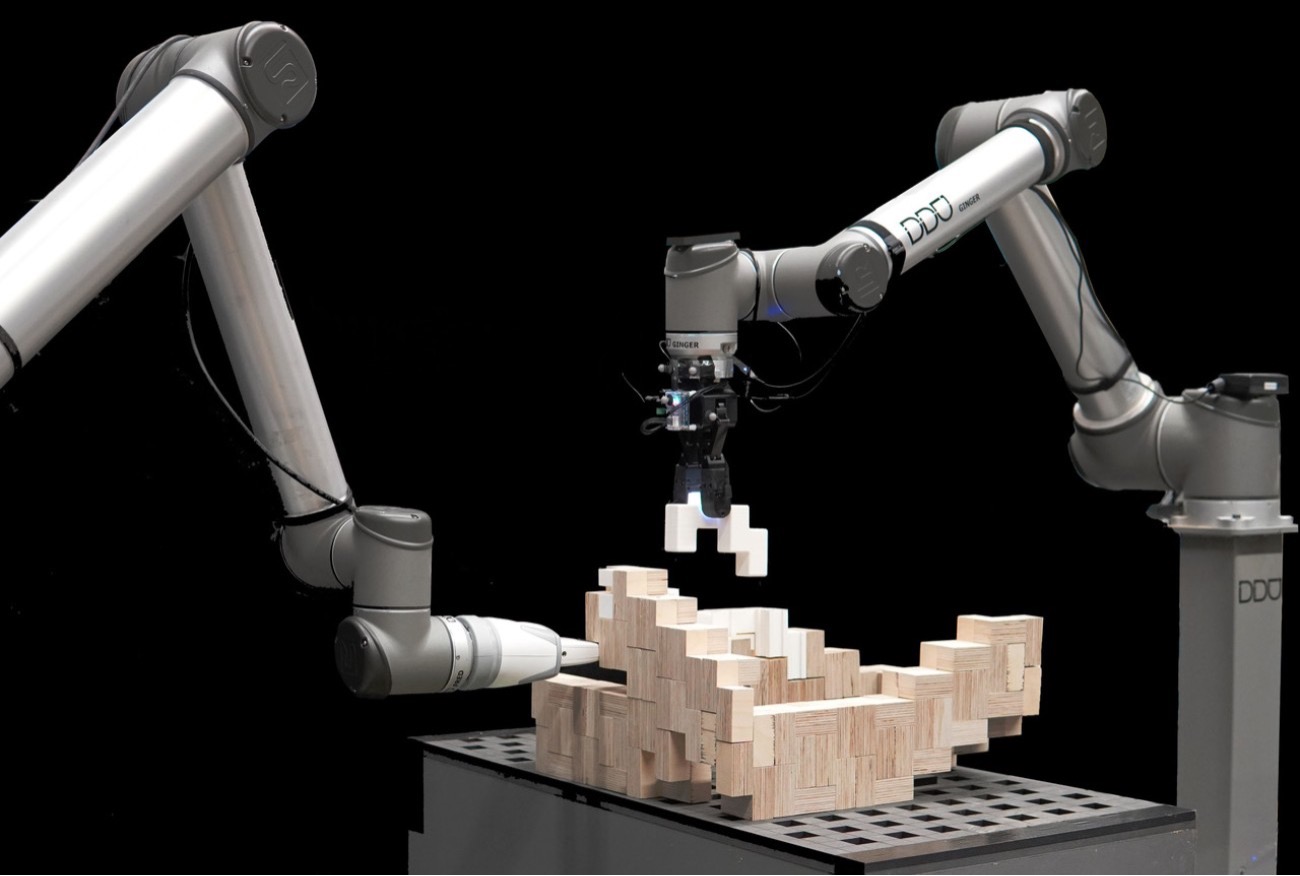
Die Baubranche ist eine Industrie, die erheblich von Automatisierung profitieren könnte, aber immer noch stark auf manuelle menschliche Arbeit angewiesen ist. Daher untersucht das DFKI-Labor Darmstadt, wie ein Roboterarm autonom eine Struktur aus vordefinierten diskreten Bausteinen montieren kann.
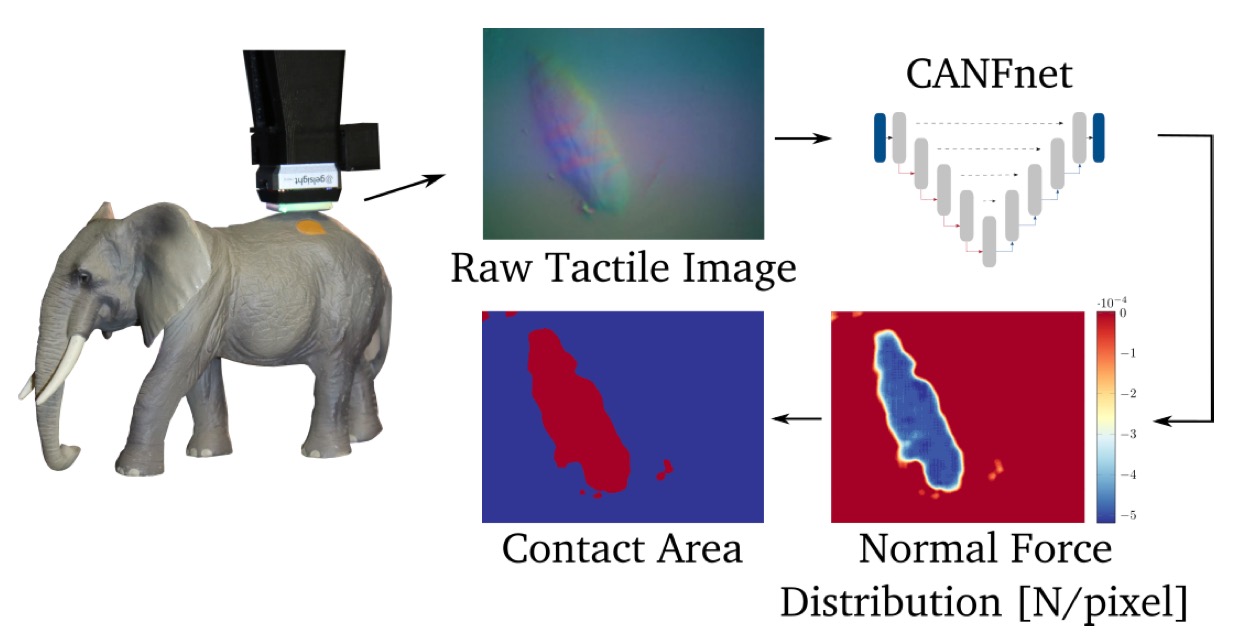
Um die anspruchsvolle Aufgabe der Montage von Bausteinen beherrschbar zu machen, nutzen die Forscher eine Kombination aus Reinforcement Learning (RL) und taktiler Sensorik. Eine neuartige Familie von visionsbasierten taktilen Sensoren, die auf der GelSight-Technologie basieren, ermöglichen kontaktreiche Roboter-Teileinsätze.
Der Forschungsbereich Systemische KI für Lernende Roboter entwickelt Machine Learning (ML)-Ansätze für das Repräsentationslernen, die speziell auf taktile Sensorik zugeschnitten sind, und zeigen auf, wie diese Repräsentationen für das Imitationslernen (IL) und das Reinforcement Learning von Montagefähigkeiten verwendet werden können. Die entwickelte Technologie wird im Kontext des architektonischen Baus an maßstabsgetreuen Gebäudemodellen für reversible Strukturen präsentiert, d.h., Strukturen, die aus diskreten Komponenten bestehen, die auseinander genommen und wieder zusammengebaut werden können, um so die Menge an Abfall im Bauprozess zu minimieren.
Dieses Projekt hat Fördermittel vom Forum für Interdisziplinäre Forschung (FiF) an der TU Darmstadt, dem Artificial Intelligence in Construction (AICO)-Stipendium des Nexplore/Hochtief Collaboration Lab an der TU Darmstadt, dem Forschungsprogramm Zukunft Bau des Bundesinstituts für Bau-, Stadt- und Raumforschung sowie dem Hessischen Ministerium für Wissenschaft und Kunst erhalten.
DFKI.AI Day
Kontakt
Dr. Boris Belousov
Forschungsbereich Systemische KI für Lernende Roboter
Boris.Belousov@dfki.de
Tel.: +49 631 20575 2904