Im Forschungsprojekt APRIL (Multipurpose robotics for mAniPulation of defoRmable materIaLs in manufacturing processes) arbeiten Forschende des DFKI seit April 2020 zusammen mit Wissenschaftlerinnen und Wissenschaftlern sowie Praxispartnern aus mehreren europäischen Ländern an einer übergreifenden Feinmotorik bei Robotern, mit der besonders weiche und elastische Produkte verarbeitet werden sollen. Das System soll auf viele Anwendungsfälle übertragbar sein und Erkenntnisse liefern, die die Automatisierung in der europäischen Fertigungsindustrie vereinfachen können.
Involviert ist der DFKI-Forschungsbereich Planbasierte Robotersteuerung aus Osnabrück, der sich im Projekt vor allem mit den Kompetenzfeldern Aktionsplanung für Roboter und Umgebungsrepräsentation befasst. Unter Aktionsplanung versteht man die Entscheidungsfindung eines KI-Systems basierend auf der maschinenverständlichen Beschreibung der Umgebung und der Kenntnis darüber, wie die Aktionen des Roboters Auswirkungen auf die Situation haben werden und welche Voraussetzungen gegeben sein müssen, um diese Aktionen auszulösen. Umgebungsrepräsentation ist die automatisierte Umwandlung von Sensordaten in aussagekräftige Informationen über die Umgebung. Diese werden in der Planung benötigt, um Rückschlüsse über den Zustand des Umfelds ziehen zu können, in der sich das KI-System bewegt. Das Robotics Innovation Center in Bremen, forscht im Projekt auf den Gebieten des Reinforcement Learning und Imitation Learning. Es geht darum, durch maschinelles Lernen von Menschen demonstrierte Handbewegungen auf Roboterhände zur Manipulation von deformierbaren Objekten zu übertragen.
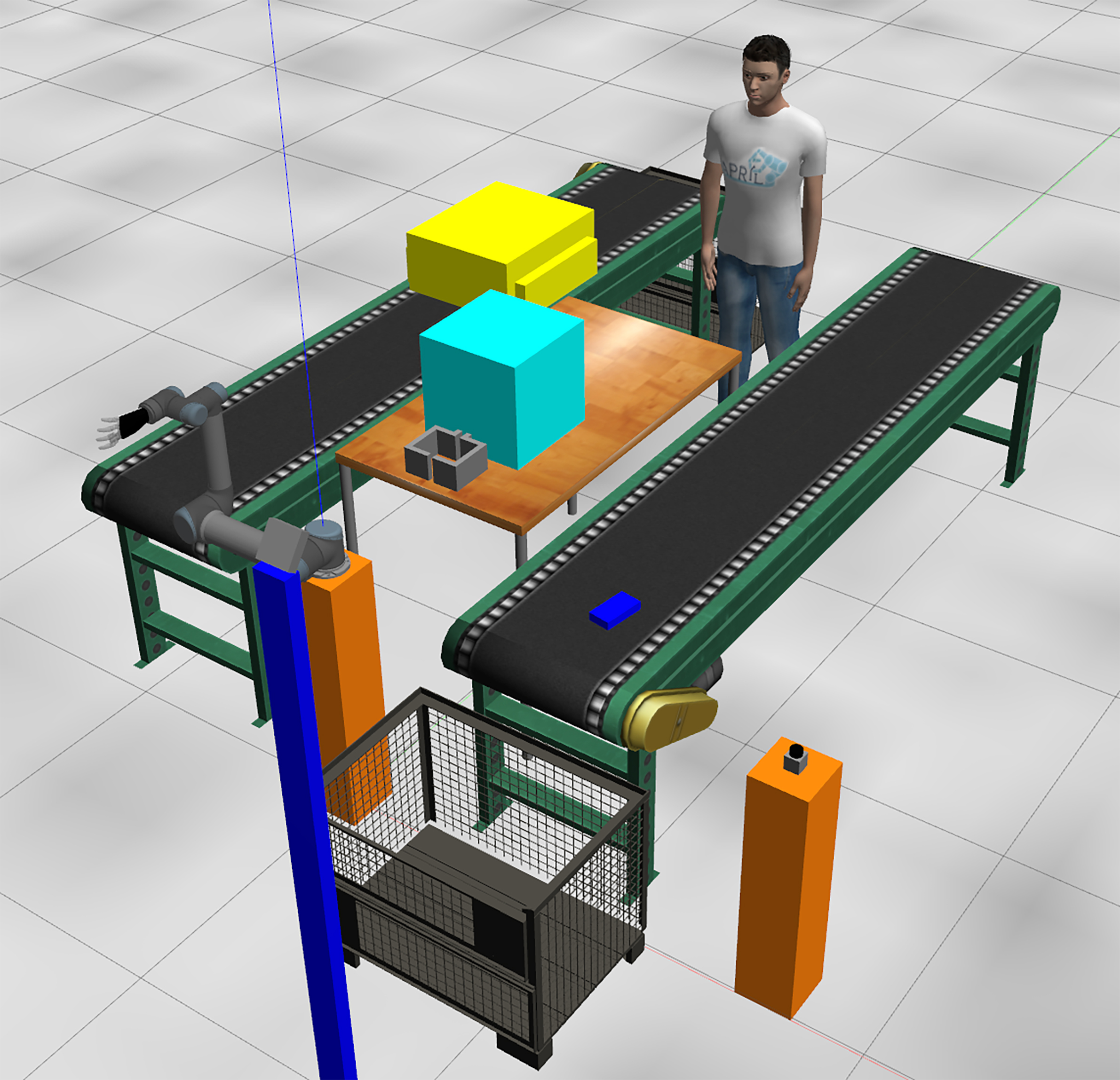
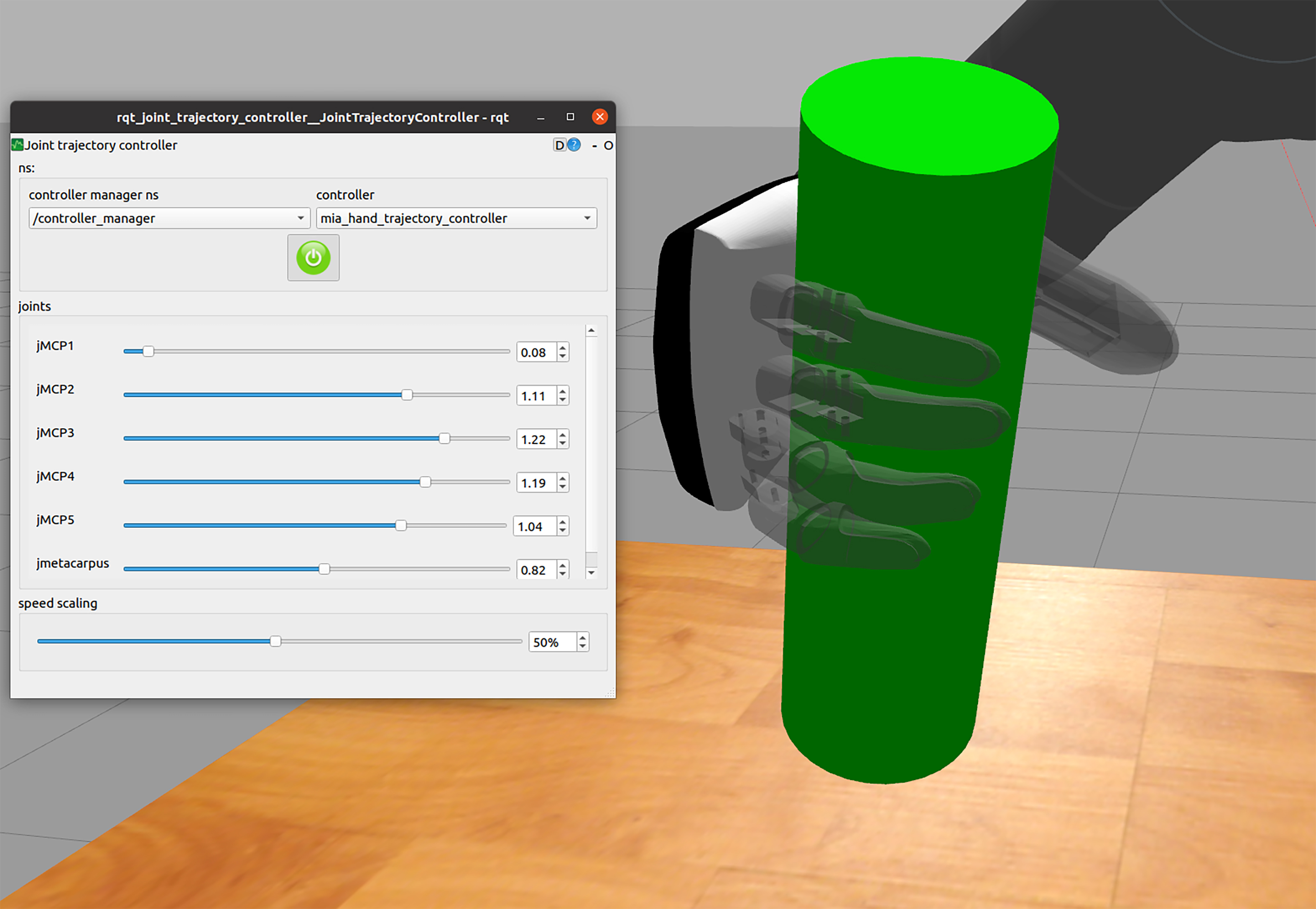
Derzeit wird von Oscar Lima Carrion und seinem Team in Osnabrück eine virtuelle Simulationsumgebung entwickelt, in der später im Projekt beispielsweise das Eintüten von Schuhsohlen trainiert werden kann. In der Umgebung kann der automatisierte Prozess in einer Schuhfabrik nachgebildet werden – vom Bewegen der Objekte über das Fließband bis zum Verpacken der Schuhsohlen durch den Roboter. Die Gestaltung solch eines Simulators erfordert unter anderem, dass neue Sensordaten im Prozess richtig interpretiert werden, Objekte in der Umgebung nicht miteinander kollidieren, Objekte erkannt werden und das Greifen der Materialien durch die Roboterhand im virtuellen Testumfeld gut funktioniert. „Für den Simulator habe ich in den letzten Corona-Monaten auch mal meine Küchenschwämme und Schuhsohlen zuhause geknautscht, damit wir besser verstehen, wie sich das weiche Material verhält. Auch wir Forschende sind neue, verrücktere Wege gegangen in dieser Zeit.“ Oscar Lima Carrion, der das Projekt in Osnabrück betreut, kommt ursprünglich aus Mexiko-Stadt und ist vor ein paar Jahren für die Robotik nach Deutschland gekommen: „Ich habe schon als Kind davon geträumt, Roboter zu bauen und die meiste Zeit meines Lebens diese Dinge studiert. Zum ersten Mal kann ich die Robotik auf ein praktisches Problem anwenden. Was mir an der Forschung gefällt, ist, dass Informationen offen geteilt werden, der Austausch ist transparent. Als neugieriger Mensch hat man die Möglichkeit, das ganze Bild zu sehen.“
Bei den Bremer Forschenden starteten die ersten sogenannten Motion-Capture-Tests. Eine menschliche Hand wird dabei gefilmt, wie sie zum Beispiel in einem Reisepass blättert. Die aufgenommenen Daten werden später für das Training von KI-Modellen verwendet, die an der Stelle im Arbeitsprozess zum Einsatz kommen, an der die Roboterhände greifen sollen. Für verformbare Objekte ist hier eine komplexe Feinmotorik nötig, die für Menschen leicht, für Roboter bisher nur sehr schwer zu realisieren ist. Durch einfache, manuelle algorithmische Befehle wäre diese Aufgabe nicht zu bewältigen. Die KI-Modelle, die aus dem aufgezeichneten Verhalten durch das Motion Capture entstehen, sollen zusätzlich durch Reinforcement Learning verbessert werden. Mittels der Lernverfahren wird so eine Art Intuition aufgebaut, wodurch die Roboterhände in sämtlichen Produktionsszenarien schnell bewegungsfähig sind. Das Projekt APRIL (Fördernummer: 870142) läuft noch bis Juli 2023 und wird von der Europäischen Kommission gefördert.
Partner: Universidad Politécnica de Madrid, Shadow Robot Company, Prensilia s.r.l., Tree Technology S. A., Istituto Italiano di Tecnologia, Przemysłowy Instytut Automatyki i Pomiarów, Scuola Superiore di Studi Universitari e di Perfezionamento Sant’Anna, Asociación de investigación para las industrias del calzado y conexas, Kontor 46 s.a.s., Silverline Endustri ve Ticaret A.S., Asociación de Investigación de Industrias Cárnicas del Principado de Asturias, Pemu Muanyagipari Zartkoruen Mukodoreszvenytarsasag, Osai Automation System SpA, Imprensa Nacional - Casa de Moeda, S. A