Exploration of our world's oceans as well as extraterrestrial oceans requires robotic systems that can operate independently and for extended periods of time underwater. A Bremen consortium has begun working on an innovative docking system for this purpose as part of the project TRIPLE-MoDo (“Technologies for Rapid Ice Penetration and Subglacial Lake Exploration – Mobile docking”). The project partners include DSI Aerospace Technology GmbH, the Robotics Innovation Center of the German Research Center for Artificial Intelligence, and MARUM – the Center for Marine Environmental Sciences at the University of Bremen. The project is being financed by the Space Administration of the German Aerospace Center in Bonn.
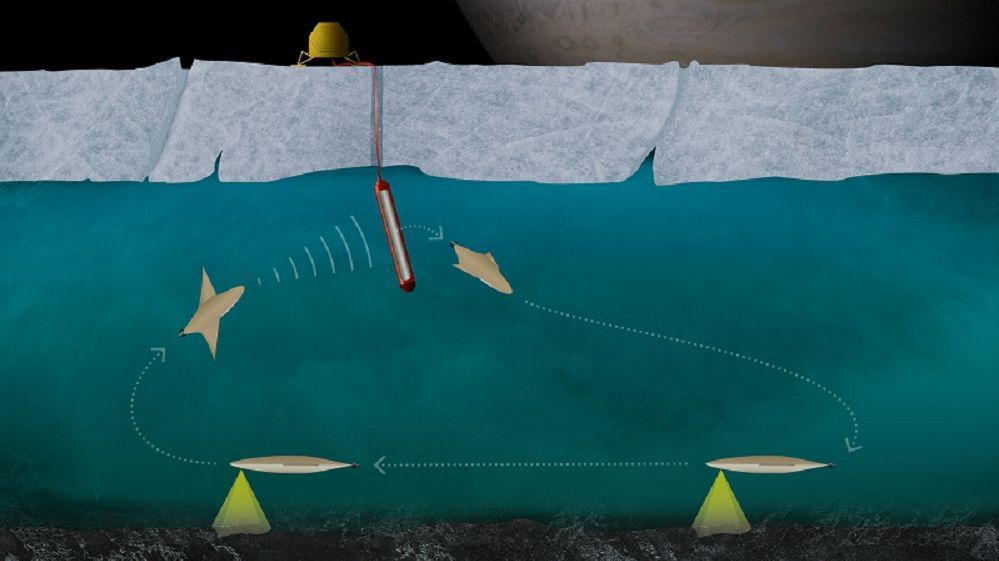
The planned system will allow an autonomous underwater vehicle (AUV) to dock with an underwater station in order to transfer data it has collected and to recharge its batteries, and thus to remain underwater for extended periods of time. In order to overcome the challenging issues encountered with docking in deep waters, the partners are using components from the field of soft robotics. These components are noted for their great flexibility and their ability to gently absorb collisions.
The TRIPLE-MoDo project is one of several initiatives that make up the overarching TRIPLE project line in the DLR's Space Administration. The mission of the project line is to develop an intelligent exploration system that can be used to carry out scientific activities in waters that lie beneath ice. The projected system consists of a fully autonomous very small submersible vehicle, called a nanoAUV, a partially autonomous melting probe that melts the ice and serves as a transport system for the AUV, and an astrobiological laboratory (AstroBioLab) to analyze liquid and sediment samples. The melting probe also serves as a fixed underwater station for the submersible to transfer data and energy.
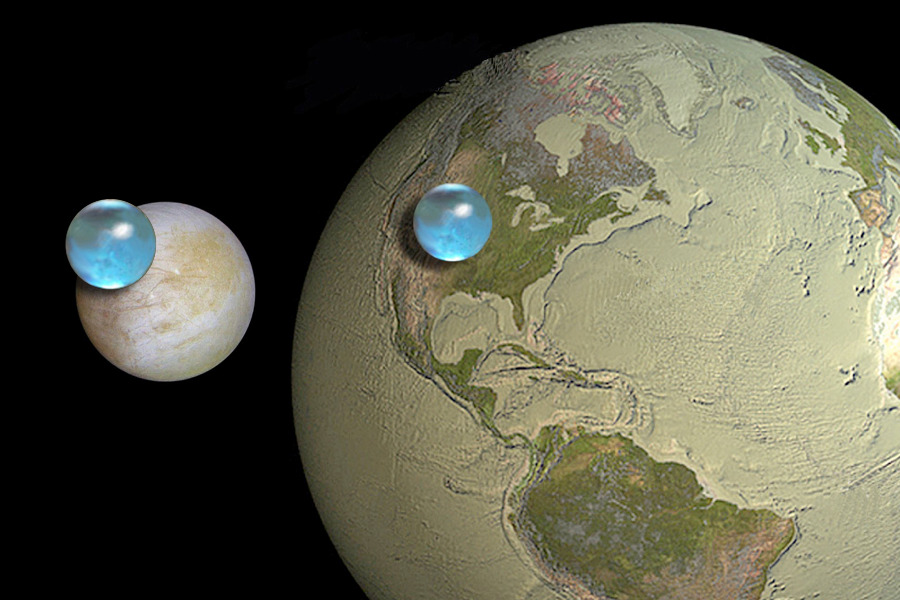
This innovative system promises to be of great value for planetary missions as well as for near-Earth space applications. The interest on the part of space research is to eventually utilize this kind of system, when it has been deployed and tested on the Earth, for the exploration of oceans on other planets and bodies, such as Jupiter's moon Europa. It is speculated that hydrothermal seeps may be present in water depths of 100 kilometers beneath the ice cover of Jupiter’s moon, which, because of the associated heat flow and influx of minerals, could support life even in those dark and cold regions.
“Europa’s presumed ocean contains an amount of water that is equal to about twice that found on planet Earth,” explains the project leader Dr. Christoph Waldmann of MARUM. “The exciting question is whether there are traces of past or present life forms in these extraterrestrial oceans.”
The fully developed system should be completed by 2027 and tested during a demonstration mission to the Antarctic region with close cooperation by marine and space scientists.
(Joint press release of the partners)
More information about the project and the participating partners:
TRIPLE-nanoAUV: https://triple-project.net
DSI Aerospace Technologie GmbH: www.dsi-as.de
MARUM – Zentrum für Marine Umweltwissenschaften der Universität Bremen: www.marum.de
DFKI, Robotics Innovation Center: www.dfki.de/robotik
Kontakt:
Dr. Christoph Waldmann
Head Coordinator of TRIPLE-nanoAUV 1
MARUM – Zentrum für Marine Umweltwissenschaften, Universität Bremen
Phone: 0421 218 65606
Mail: waldmann@marum.de
Dr.-Ing. Jochen Rust
Project Coordinator of TRIPLE-MoDo
DSI Aerospace Technologie GmbH
Phone: 0421 596969-35
Mail: jochen.rust@dsi-as.de
Dipl.-Ing. Miguel Bande Firvida
Team Leader TRIPLE-nanoAUV
Phone: 0421 17845 5064
Mail: Miguel.Bande_Firvida@dfki.de