Das Critical Design Review bietet die Möglichkeit, die vom Konsortium ausgearbeiteten Projektentwicklungen innerhalb von fünf Schlüsselkriterien zu bewerten:
1. Funktionell zusammengestellter Spiegel mit selbstständig einstellbaren Segmenten
2. Standardisierte Schnittstellen zur Verbindung von Strukturelementen und Bereitstellung von Strom- und Datennetzen
3. Präzise Montage
4. Anpassbare Wahrnehmung und Lokalisation
5. Erweiterte Beweglichkeit
Drei Demonstratoren werden von der Europäischen Kommission und von der PSA (Programme Support Activity) bewertet:
Die zwei Hauptziele vom Demonstrator dISAS (demonstrator of In-Space Assembly in Simulation) sind die Bereitstellung von Werkzeugen für die Spezifikation, Ausführung und Visualisierung der Montage großer Strukturen durch Simulation, um ihre Durchführbarkeit zu bestätigen, und eine konkrete Anwendung für die Montage eines Teleskopspiegels im Weltraum.
Die französische Firma Magellium entwickelt einen Simulator und verwendet ihn operativ, um den Entwurf des Demonstrators zu validieren und die Genauigkeit in Bezug auf eine echte Raumfahrtmission sicher zu stellen.
Das französische Labor ONERA ist wiederum für die Erstellung und Optimierung von komplexen Werkzeugen verantwortlich, die für die Synthese eines realistischen Lagereglers für Raumfahrzeuge erforderlich sind und das Raumfahrzeug während der Montage stabilisieren.
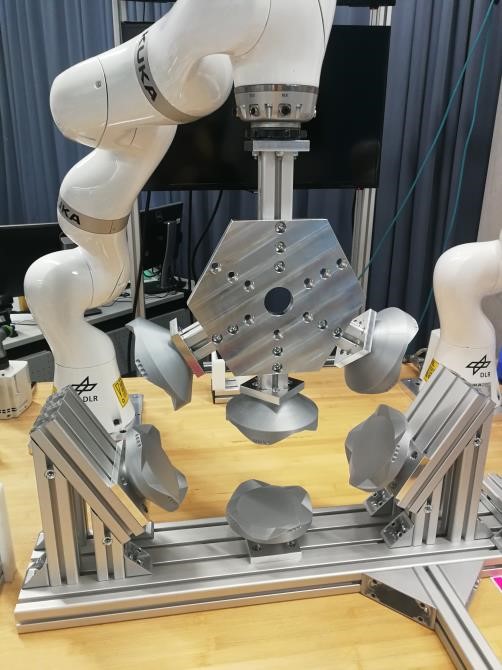
Der Demonstrator dPAMT (Demonstrator für hohe Präzision während der Montage) hat eine Methode zur Verbindung der Segmente erarbeitet.
Für diesen Demonstrator arbeitet das Deutsche Zentrum für Luft- und Raumfahrt mit dem Schweizer Unternehmen CSEM für Robotermechatronik und der belgischen Firma Space Application Services für die standardisierten HOTDOCK-Schnittstellen an den Spiegelsegmenten zusammen.
Das Ziel des dPAMT ist die Darstellung einer hochpräzisen Robotermontage von Spiegelsegmenten und die Überprüfung der Genauigkeit der Endmontage. Außerdem wird es als Demonstrator für die Funktionalität des Spiegelsystems dienen. Dadurch werden die Schlüsselkriterien 1, 2, 3 und 4 erfüllt.
Die Aspekte des fünften Kriteriums (Erweiterte Mobilität) werden durch den Einsatz einer mobilen Roboterbasis demonstriert (nur in Anbetracht der Mobilität zur Erweiterung des Arbeitsbereiches des Manipulators während der Montage, und nicht zur Untersuchung der dynamischen Auswirkungen des gesamten Raumfahrzeugs in der Mikrogravitation, welche im Rahmen von dISAS erfasst werden).
Der Demonstrator befasst sich mit der Durchführbarkeit einer autonomen Montage von Spiegelsegmenten für ein Teleskop unter Einsatz von den Standard-Anschlussschnittstellen (HOTDOCK) und eines geeigneten Robotermanipulators.
Ein weiteres Ziel des Demonstrators ist die Überprüfung der Montage der Spiegelsegmente mittels eines externen Messgeräts und das Veranlassen geeigneter Bewegungen der optischen Oberflächen in den Spiegelsegmenten, um während der Montage verursachte Ausrichtungsfehler zu korrigieren.
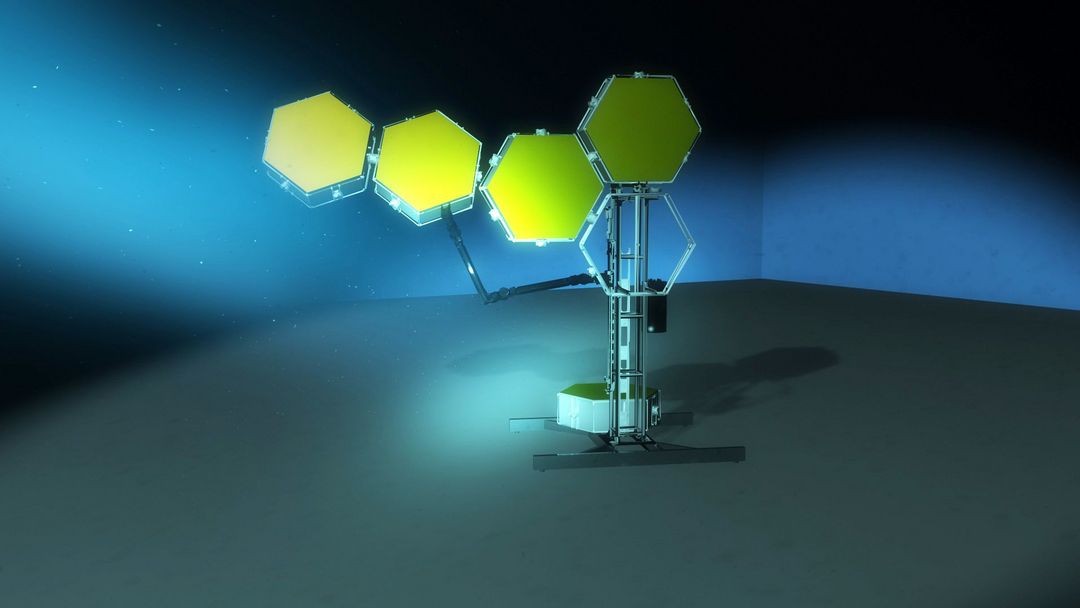
Der Demonstrator dLSAFFE (demonstrator of Large Structure Assembly in Free Floating Environment) wird im 3.400 m3 großen Salzwasserbecken am Deutschen Forschungszentrum für Künstliche Intelligenz (DFKI) in Bremen getestet.
Diese Umgebung ohne Auftrieb erleichtert die Gewichtseinschränkungen manipulierter Objekte und ermöglicht somit die Montage und Interaktion mit großen Strukturen. Mit dem dLSAFFE wird der Zusammenbau des Teleskopspiegels in großem Maßstab demonstriert, der das Robotersystem und die Spiegelsegmente in einem Größenverhältnis von fast 1:1 darstellt. Dadurch werden die Schlüsselkriterien 4 und 5 eingehalten. Die erweiterte Beweglichkeit ermöglicht ein System, das mit einem Roboterarm von minimaler Länge eine sehr große Struktur aufbaut, was bedeutet, dass der begrenzte Arbeitsraum des Manipulators überwunden wird, indem Teile der Struktur direkt an der Station aufgebaut werden.
Mit seinem Wissen über Unterwasser- und Weltraumroboteranwendungen übernimmt das DFKI die Gesamtverantwortung für diesen Demonstrator und wird von Graal Tech aus Italien im Bereich Unterwassertechnik unterstützt.
Das H2020 PULSAR Konsortium
Das Konsortium besteht aus Magellium, Graal Tech SRL, dem Schweizer Zentrum für Elektronik und Mikrotechnik (CSEM), dem Deutschen Zentrum für Luft- und Raumfahrt (DLR), dem Deutschen Forschungszentrum für Künstliche Intelligenz (DFKI), Space Application Services, ONERA und Thales Alenia Space.
Ansprechpartner
Projektmanager des Konsortiums:
Thierry Germa
Telefon: +33 562 247 753
E-Mail: therry.germa@magellium.fr
EU-Beauftragter für das Forschungsprogramm:
Christos Ampatzis
Telefon: +32 2 29 69723
E-Mail: christos.ampatzis@ec.europa.eu
Bilder sind unter www.h2020-pulsar.eu und via Twitter @H2020-PULSAR verfügbar.
PULSAR (OG 8) ist Teil des EU Strategic Research Cluster “Space Robotics Technologies”
Dieses Projekt wurde durch das Forschungs- und Innovationsprogramm Horizont 2020 unter der Zuschussvereinbarung Nr. 821858 finanziert.