en

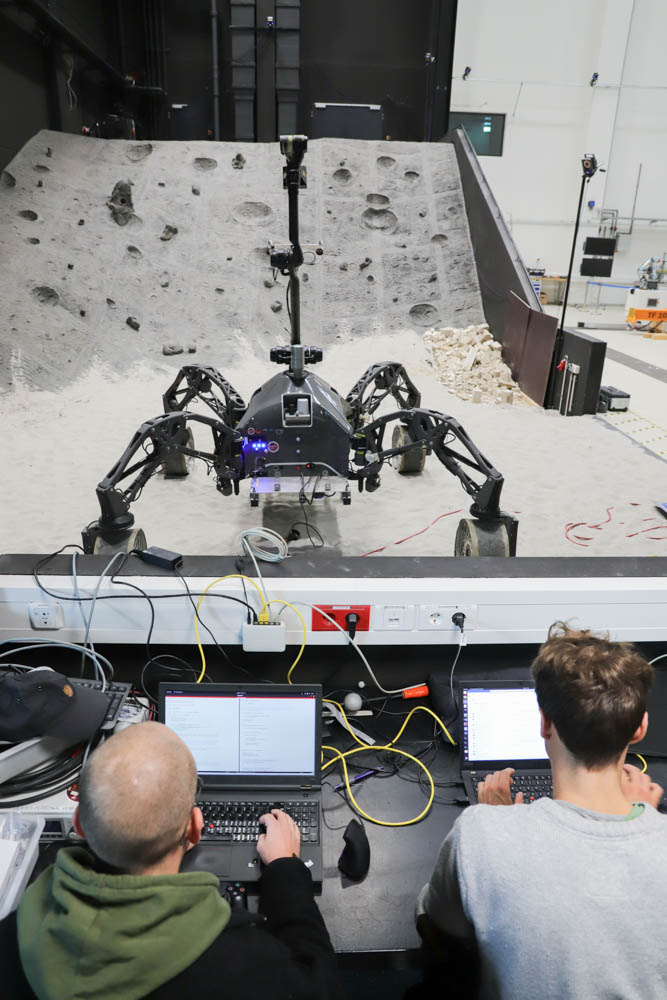
CoRob-X Field Trials Blog, Lanzarote 2023
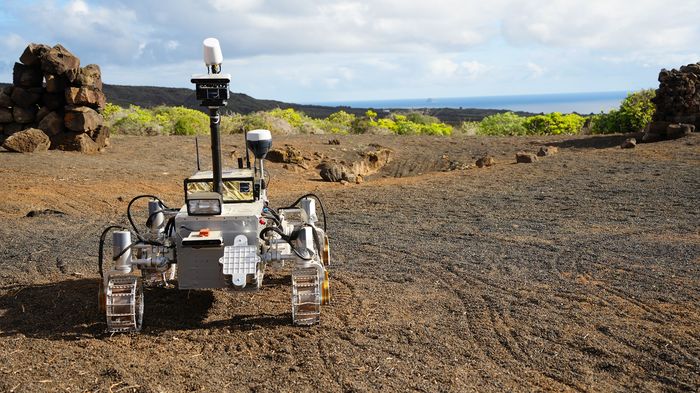
Protection from cosmic radiation, even possible water resources: When it comes to finding suitable areas for long-term lunar missions, the lava tubes on the moon are of great interest. To investigate the potential of these caves for future space exploration, robots will be used. In the project “CoRob-X”, a European consortium led by DFKI is researching how a team of several autonomous rovers can cooperatively reach and explore a lava tube by rappeling down a robot to the floor of the cave. At the end of the project, the partners will conduct an extensive field test campaign to prove the feasibility of their ambitious concept. From January 21 to February 11, 2023, they will put the developed technologies to the test in a complex mission scenario in a lava cave on Lanzarote, one of the Canary Islands.
CoRob-X is part of the Strategic Research Cluster (SRC) "Space Robotics Technologies". It is funded under the Horizon 2020 program of the European Commission and supervised by the PERASPERA Programme Support Activity. For more information about the context of the project, the mission concept, and the technologies developed in the SRC, visit the CoRob-X website at https://www.corob-x.eu/
In this Blog, DFKI employees Thomas Vögele and Tom Becker will regularly report on current events on site and the progress of the field trials.

CoRob-X Mission Phases
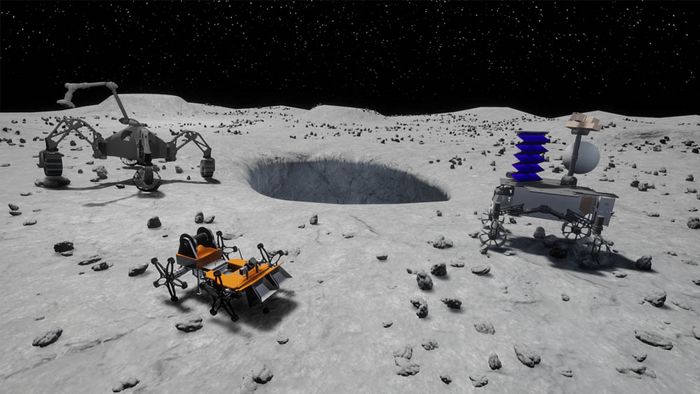
The Moon's surface is covered by millions of craters, but it also hosts hundreds of very steep-walled holes known as pits. Like doorways to the underworld, photos of some pits clearly show a cavern beneath the Moon's surface, suggesting that they are ‘skylights’ into extensive lava tubes that can be as wide as New York's Central Park, and could extend for hundreds of kilometers. These tubes are thought to have formed during lava flows billions of years ago, when the Moon was still geologically active.
These characteristics allow building safe, yet economical habitats in lava tubes. Prior to establishing a habitat, such a lava tube needs to be explored and categorized for assessment of stability and safety and for the existence of frozen water. Thus, the exploration of the geological strata in the Skylight and of the lava tube itself (both from the inside of the tube and from the lunar surface) are the key scientific objectives of the CoRob-X Space exploration mission.
Mission Phase 1 – Cooperative Exploration and Mapping
Based on remote sensing data created by an orbiter, the area in the vicinity of the Skylight is divided into segments. This division considers the different locomotion capabilities of the REUs and merges their individual traversability maps. Each segment is explored by the REU capable to access it. In the analogue simulation, very difficult terrain can be expected near the Skylight. REU-1 and REU-2 will demonstrate their flexible locomotion capabilities to traverse this terrain. Each REU uses a customized version of the I3DS sensor module (a result of SRC operational grant OG4) to create a detailed Digital Elevation Map and a 3-D environment map. During the whole operation, the robots communicate with each other and exchange the map data. Thus, a joint map is built simultaneously in all three systems.
MP1 also includes the mapping of the roof of the lava tube with the GPR sensor on board of REU-2. The joint environment map will thus include an indication of the location and depth of the lava tube.
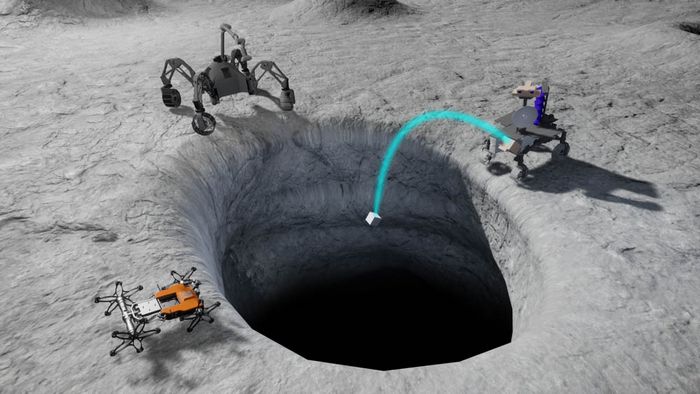
Mission Phase 2 – Skylight Exploration with Payload Cube
Once the surroundings of the lava tube entry hole are mapped, a convenient approach to the skylight is planned and all systems move towards the rim of the skylight. REU-3 is equipped with a deployable ballistic Payload Cube. The cube is deployed into the skylight by a mechanical deployment device (“propeller”). On the Moon, due to the low lunar gravity, the cube will drop at a relatively low speed and will be able to log data for a high-resolution image of the walls and the skylight floor with its on-board cameras and an integrated lighting device. In the analogue mission, the drop will be faster and thus the data recovered somewhat less detailed.
Before the deployment, the three REUs position themselves around the rim of the skylight and track the Payload Cube in-flight using their on-board sensors and the markers and light source of the Payload Cube. The sensor data are merged on REU-1 and used to create a precise trajectory analysis of the cube’s flight. The ADRES uses this data together with the data collected by the Payload Cube itself to compute a preliminary 3-D representation of the skylight. This representation is transmitted to the RMS.
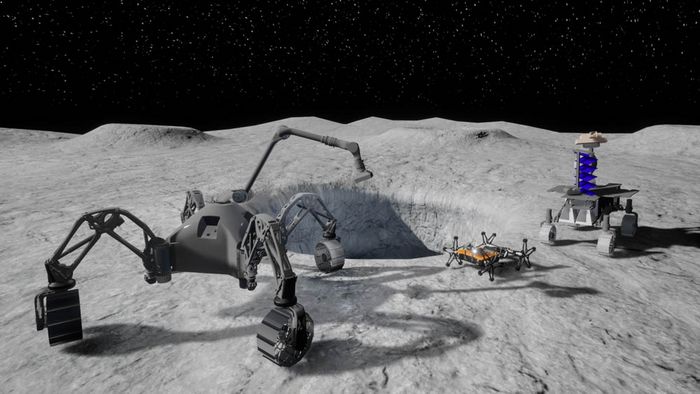
Mission Phase 3 – Skylight Exploration with Rapelling Robot Team
The ADRES is able to select a feasible starting point for the exploration, and REU-1 and REU-2 move into position. REU-3 takes a position at the opposite side of the skylight. Its task is to monitor the descend of REU-2 in support of the coordination of the actions of REU-1 and REU-2.
REU-1 uses its manipulator arm to guide the tether and enable REU-2 to connect via the HOTDOCK interface to the Tether Management and Docking System (TMDS). The active suspension system of REU-1 can be used to lower the body of REU-1 to the ground if stable anchoring is required. Alternatively, the mobility of REU-1 can be used to establish a mobile anchor for improved mobility of REU-2. Once REU-2 is connected, REU-1 uses its arm to guide the tether in the Rapelling of REU-2 down the cliff into the skylight. The current concept for the tether/lander management foresees that the tether is stored on the lander side, i.e. on REU-2. This way, the tether can be spooled from REU-2 and tangling or rupture of the tether (when gliding over rocks) can be avoided.
On its way down, REU-2 uses its on-board illumination device to illuminate the scene and its sensors, including the GPR, to create a vertical visual profile of the cliffs, as well as a 3D reconstruction of the area it traverses.
Mission Phase 4 – Lava Tube Exploration with Scout Rover
For the exploration of the lava tube REU-2 disconnects from the tether and moves into the lava tube. REU-2 uses the GPR and the time-of-flight cameras on board to a.) create a 3-D model of the lava tube and b.) explore the consistency, porosity, and thickness of the lava tube walls. The latter is valuable information to answer the question of whether the lava tube can be sealed off and filled with an atmosphere at a later stage. In addition, if some water in the form of an ice crust is present, this will be detected.
The data from REU-2 are sent via the tether module and/or Payload Cube – which now acts as a relay beacon – to REU-1 and to the RMS. This allows to implement a redundant communication link.
After the mission in the lava tube is finished, REU-2 moves back to the tether and re-docks to the tether/lander unit. As energy can be sent from REU-1 through the cable, REU-2 may re-charge and thus effectively stay in the lava tube as a “resident rover” able to explore for an extended period of time. Alternatively, it may be lifted out of the lava tube with the help of REU-1. In the analogue mission, the latter will be demonstrated (3 times).
In this project, we will develop the concept of a re-docking interface based on HOTDOCK that is integrated into a lander/tether management unit and rappelled down into the Skylight with REU-2. In a real lunar (or even Martian) mission, the weight of this unit plus REU-2 would be manageable by REU-1 without a problem as a result of the lower gravity. In the analogue mission, we will apply extreme light-weight construction so that it can be handled by REU-1 (SherpaTT). With the exploration of a lava tube described above, the CoRob-X mission tackles one of the most difficult and complex, yet scientifically most rewarding challenges for robotic exploration. The mission scenario in CoRob-X is targeted for lunar exploration, but it is – with slightly altered system parameters due to the different gravity and atmospheric conditions – in principle also valid for the exploration of lava tubes or cliffs/canyons on Mars. In addition, if the ADRES can handle the entry of a rover into a lava tube via the skylight, it can also handle the descend into any lunar or Martian crater.
Blog
February 11th, 2023
Departure Day
Today we had to finally say goodbye to Lanzarote. This blog post will be the last one and we would like to thank everyone who took the time to read our posts and followed us in this way during our field trials. Please feel free to give us (Tom & Thomas) your feedback.
Our main goal for the last day on the Canary Islands was to finish packing and loading everything into our two containers and seal them for shipping. We started in the morning by packing all the boxes into the containers in the order we wanted them. Afterwards, part of our team had to go directly to the airport.
Unfortunately, due to sandstorms and some logistical problems on behalf of Lufthansa, the flight was delayed, and we had to wait for about four hours at the airport in Lanzarote. Luckily, we met our colleagues from DLR, Airbus and GMV – so at least we had some good company. We managed to catch the last plane to Frankfurt where we had to stay for one night. At the next day we finally arrived in Bremen. Time for some rest ...


Public Day in Haria
February 10th, 2023

After the physically and mentally exhausting previous day we decided to start at the camp a little bit later today. The plan for today was to further disassemble the camp and put more equipment into the container and prepare the demonstration for the public day in the city of Haria.
With the much-appreciated help of our colleagues from GMV, UMA, Magellium and some others, we could already package one of the big tents and the desks/tables yesterday. We left the community and mechanics tent intact to protect our systems and tools from rain and wind.
In order to introduce the people of Haria to space robotics, we had to prepare SherpaTT, Coyote III and Asguard for the transport with a truck to the city center. Before we packed the robots, Raul used his last chance, and we took Coyote and Asguard to the caves for one final video and photo-shooting. We ended up with some remarkable shots of Asguard and Coyote crawling through the caves.
We arrived at 4 pm in Haria and set up everything for the public exhibition. For around two hours people had the chance to see our three systems in action at the market square. A panel consisting of Jorge Ocon (GMV), Thomas Vögele (DFKI), Alexander Dettmann (DFKI) and Christos Ampatzis (EC) answered questions from the audience.
We had not expected such a big audience, but it was great to introduce the local people to the project. In particular the next generation of potential space explorers was very excited about our rovers and asked many interesting questions, which Jorge answered very professionally in Spanish.
While the rest of the team continued packing at the field camp, we had a final meeting with the PERASPERA-X PSA and EU for a wrap-up of the project results after the public event. Although some minor shortcomings were identified, the overall feedback to the project was very positive and the CoRob-X team was praised for its excellent work and execution of the Lunar Analogue Mission as well as Terrestrial Demonstrator.
The day was finished with a joint dinner of all participants and visitors at the Haria Cultural Center. It was a lovely evening and a very emotional goodbye. It was the culminating conclusion to these three weeks of field test where many new friends have been made and great ideas been exchanged.
Grand Finale: Demonstration Day
February 9th, 2023

Today was the day of the grant finale and demonstration of the lunar analog mission. The DFKI team was on-site before dawn to get the systems ready and get some last-minute tests done.
During one of these tests, the HotDock interface jammed. Apparently dust and tiny rocks had managed to get into the mechanics and caused a malfunction. As without the HotDock interface, both mission phases three and four were in jeopardy and Space Applications could not bring a spare to the tests. The team was stressed out, to put it mildly. But “nothing is impossible for an engineer”, as Donald Ducks friend Gyro Gearloose used to say, so we set up a live-stream to the Space Applications headquarters in Brussels and Chris, one of our DFKI engineers, with the help of a remote Space Apps engineer, spent the better part of the morning to take the complex system apart, clean it, and put it back together again. Now we could only hope that it will work during the demonstration!
In the meantime the CoRob-X team and our visitors had arrived. They were complemented by Prof. Xiu Tan from Strathclyde University who is a member of the CoRob-X Exploitation Board. With only a small delay of 30 minutes for mission phase one, Iulia from GMV in our mock-up Ground Control could push the button to get the mission started. SherpaTT and LUVMI-X moved into their starting positions near the skylight and began to scan the area. Meanwhile Coyote III followed a linear trajectory across the expected location of the cave, making stops every 10 cm to take measurements with the GPR radar provided by LATMOS.
Tension was rising as SherpaTT and LUVMI-X moved dangerously close to the skylight, and to each other. One false move, and they would slide into the skylight and drop a full four meters to the ground of the cave. Or, no less dangerous, the two rovers could collide. As a great relief to everyone watching, the autonomy software worked as it was supposed to, recognized both the skylight and the other rover as obstacles, and commanded the rovers to move away. The map created by the cooperating rovers was of good quality, so mission phase one was a full success.
In mission phase two, the skylight and the cavity below are explored by a sensor cube equipped with an array of high-velocity cameras. This cube is deployed by the LUVMI-X rover. To simulate the drop velocities that would be realistic under lunar conditions, Space Applications used an electric winch and a cable to lower the sensor cube into the skylight. Because the high-tech cube would not survive the four-meter drop to the cave floor under terrestrial conditions, the deployment from LUVMI-X was demonstrated with a light-weight mock-up. In any case, the data gathered by the cube looked very good and a precise 3-D map of the skylight could be produced. Mission phase two was successful.
After lunch with the infamous bocadillos from Fabian’s shop in Haria, we continued with the highlight of the day, mission phase three. In this phase, the Coyote III rover is rappelled into the cave held only by a cable, or tether, that was anchored in SherpaTT. We had rehearsed the experiment before, but never without a security rope. The question was: Will the cable, and in particular the HotDock interface hold the 50+ kilos of Coyote III and save it from crashing on the cave floor?
Mission phase three started with SherpaTT deploying the Tether Management and Docking System (TMDS) and Coyote III docking to it. The TDMS holds the tether cable and enables Coyote III to rappel spider-like into the depths of the Skylight. TDMS and Coyote III are connected via the HotDock interface. The complex procedure worked quite well and Coyote III, with the TDMS under its belly, disappeared into the hole.
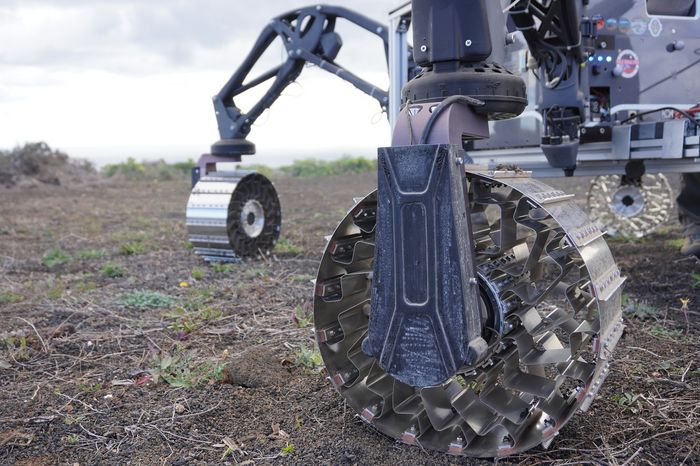
Landing on the cave floor was the next challenge. As expected, Coyote III rotated while dangling on the rope, but also as expected, the forward turning wheels could stabilize the rover as soon as it touched ground. From down in the cave came the signal “The Coyote III has landed!” and everybody watching the spectacle was relieved that the rover neither got stuck nor crashed!
The only flaw in the otherwise very successful mission phase three was that HotDock had to be manually convinced to unlash and release the rover into the cave.
This was where mission phase four started. The rover slowly made a full turn on the landing site and created a map of the so-far uncharted terrain. Unfortunately, the next step, the selection of the best route to enter the cave, could not be demonstrated due to a software error. Instead, the robot was brought to the cave entrance where it started its autonomous exploration of the cave in the other direction. The 3-D data and maps produced this way were good so that mission phase four can be called if not fully at least partially successful.
While the visitors headed back to their hotels to get ready for dinner, the day was not yet over for the CoRob-X team. Because the weather forecast predicted heavy rains for the days to come, we decided to unmount at least one of our three tents tonight.
But finally, this day ended with happy, but exhausted faces and a big celebration with wine, beer, and tasty Spanish food.







Rehearsal Day
February 8th, 2023
Today we could finally welcome our VIP guests from the European Commission, the PERASPERA-X PSA including representatives of the European Space Agency (ESA), the German Aerospace Center (DLR), the French Space Agency (CNES), the Spanish Center of Development of Industrial Technology (CDTI), and Mariella Graziano from GMV in our field camp on Lanzarote. During the first rain shower of the day, the reviewers were able to experience firsthand the harsh and somewhat unpredictable environmental conditions on the island.
The goal of today was to perform the entire lunar analogue mission with all four mission phases, one after the other. We had a good start, the collaborative mapping and exploration (mission phase one) worked very well, and our robots were able to safely approach and explore the region around the skylight.
Once LUVMI-X reached the skylight and positioned itself correctly, we could start the mission phase two: exploring the skylight with the sensor cube. After some preparations, our colleagues from Space Applications were able to deploy the cube into the hole and map the walls.
For lunch we had delicious local burgers and afterwards, the rappelling maneuver with SherpaTT and Coyote III was started. It worked very well, and we are confident that we will be able to deliver a flawless demonstration tomorrow.
The rest of the day we conducted experiments of mission phase four in the cave with Coyote and in parallel did maintenance work on the other systems. We left the site somewhat earlier as usual (i.e., before sundown) to get some sleep so that everyone (humans and robots) can perform at 100% capacity at tomorrow's demonstration.



Somewhere over the Rainbow
February 7th, 2023

We are facing the last three days of our field trials on Lanzarote and there is still work to be done. Just like yesterday, our goal for today was to get mission phases three and four ready for demonstration. After some initial rain, the weather became sunny, and we were working under a nice rainbow for some hours.
Some good progress was made regarding the docking today. Over the past few days, Coyote III has been used extensively for mission phase four experiment – so Leon was more than glad to now be able to perform some experiments on docking and undocking from the TMDS.
Because Coyote III was involved in so many mission phases, we had to shorten the mission phase four experiments a bit. Nevertheless, our colleagues from LATMOS were busy with their Wisdom GPR collecting more lava tube detection data.
Jonathan was able to successfully demonstrate the use of the TMDS and we created a short video of the execution in our mechanics tent.
Tomorrow the first VIPs will arrive, and we plan to conduct a rehearsal of all four deployment phases. My colleague Meltem from the DFKI media team joined us yesterday and we hope to deliver some nice videos and photos in the next days.





February 6th, 2023
Tornados at the Horizon
Another day filled with experiments has passed. After successfully demonstrating mission phase one at the end of last week and mission phase three last week, our eyes now turn to mission phases two and four.
Today, our colleagues from Magellium and DFKI spent another full day in the caves working on autonomous cave exploration. After some connectivity and power issues, they made good progress and Coyote III was able to conduct a successful exploration on easy terrain, including a return to the home pose.
Another important mission component is the docking to and undocking from the Tether Management and Docking System (TMDS). Currently, we are still having trouble getting Coyote III positioned correctly on it – our colleagues have been working on this whenever Coyote III was available for sensor calibration (unfortunately not very often due to mission phase four experiments).
Besides the experiments, everyone is already excited about the demonstration for the VIPs on Thursday. With many components already working fine, we are optimistic that we can deliver a great result to the reviewer and make this mission a success story.
Another natural phenomenon we could observe today were more tornadoes on the horizon. There have been devastating tornadoes in Lanzarote over the weekend (fortunately not in the camp), but today we could see some smaller ones forming over the sea – a real spectacle.
February 4th/5th, 2023



Finally weekend! Although this didn’t make a big difference for the CoRob-X team. Too many lines of software code to be optimized, motors and robot legs to be fixed, and tests to be run. Each minute of a field test like this one is precious, so that, after having recovered from the Friday-night BBQ, most team members put in another full day of work on Saturday.
The DFKI team struggled to optimize the deployment of the Tether Management and Docking System (TMDS) and the deployment and re-docking of Coyote III. Both functionalities are needed for Mission Phases three and four, respectively. Meanwhile, Magellium, Space Applications, GMV, and UMS worked on some final bug-fixing and optimization of the software that allows our robots to become autonomous.
Tom and Tobi used the opportunity to make videos of the robots in action and to document life and work in the camp.
On Saturday afternoon, two visitors from Dresden University in Germany joined the team. University Dresden is partnering with LATMOS on the development of the WISDOM Ground Penetrating Radar (GPR) for ESAs ExoMars mission. They were on the island already and seized the opportunity to do some testing of the radar in the vicinity of a real lava tube.
Unfortunately, as GPRs do not work well in wet soil, they didn’t pick the best day for their experiments. Around noon and completely out of the blue, a heavy thunderstorm hit Lanzarote. Heavy rains accompanied by a severe hailstorm turned dry creeks into raging torrents and parts of the island into a snow-packed winter landscape. Fortunately, the test site was spared from serious damage and from thunderbolts.
On Sunday, the day after the storm, the weather was bright and warm as ever and at least some members of the team could take parts of the day off to enjoy the beauties of the island, such as Timanfaya National Park and the famous Playa Famara.
February 3rd, 2023
Mission Phase One Accomplished
Today we had another excellent day in our field test campaign on Lanzarote. We started the day with perfect weather conditions and were able to continue the experiments from yesterday straight away.
In the morning, our colleagues from LATMOS went to the cave to perform more tests for mission phase four and additional data collection for the WISDOM GPR. Together with Tobi and Christopher, I (Tom) prepared the area around the Skylight, and we shot some footage for the project video on autonomous cave exploration after the LATMOS team was done with their experiments.
We ended the second field test week with an absolute highlight: autonomous exploration in the first mission phase was fully achieved today and demonstrated with LUVMI-X and SherpaTT. The colleagues from GMV, DFKI, Space Applications and Magellium were incredibly proud to have completed this complex mission scenario.
The plan for the final chapter of our field trials on Lanzarote is to enhance mission phases three (rappel maneuver) and four (cave exploration) within the next week and demonstrate all four mission phases to our VIP guests.
Tonight, we are going to have another barbecue in the apartments where the DFKI team is staying and meet up with all the people who arrived after last weekend's great party. During the weekend we plan to record more footage for the CoRob-X mission video and work on the TMDS mission.





February 2nd, 2023
This Thursday greeted the CoRob-X team with less wind, more sun and definitely less dust than the day before. Maybe just the quiet before the storm? According to our night guard, a heavy blast of Calima bringing a serious amount of Sahara dust to the island has been predicted for the weekend ...
For now, we enjoy the fine weather and made good progress with our experiments today. LUVMI-X successfully explored the surface above the lava tube, skillfully avoiding the Skylight. SherpaTT followed suit and both robots created maps that were visualized via the RMS (Remote Monitoring Station).
In the meantime, Coyote – equipped with the Wisdom GPR (Ground Penetrating Radar) developed by French partner LATMOS – made a radar survey of the area where we expect the lava tunnel to be. The GPR worked well and the guys from LATMOS could identify the top of the tunnel on the radargrams.
After the GPR survey, Coyote III moved on with preparations for the autonomous exploration of the lava tube. It still needs some exercise to find its way back to the docking station for re-docking and upload of the survey data.
With all the experiments going well and the weather improving, the morale of the CoRob-X team is good. It got even better after the team had been treated with tasty Spanish hamburgers and fries for lunch. The only dent in the overall positive camp vibes was the fact that, very much to the dismay of our female engineers from Spain, the huge German mastiff that lives in the neighborhood and that has become our new camp mascot had to stay home today. He caused too many disturbances, shuffling across experiments and disturbing videos from the “lunar” surface …



February 1st, 2023
Sandstorm and an Unexpected Visitor
The sandstorm that started yesterday continued today and we could hardly see the sea or the sun. Nevertheless, it was mild weather, and we were able to continue our test campaign – space rovers have to cope with even harsher conditions than the "Calima".
Our camp morale is at an all-time high thanks to the neighbor's dog, who seems very interested in space robotics, experiments (and of course our lunch). His curiosity is justified, as we made some great progress today.
LATMOS conducted more experiments with Coyote III and the GPR. After burying metallic nodes in the ground, they were able to generate the first relevant data sets. Coyote III will soon be ready to join the first mission phase scenario.
LUVMI-X had a special mission today. Space Applications and Magellium conducted some preliminary experiments for the second mission phase. After some autonomous exploration at the Skylight, LUMVI-X was positioned close to the crater and processed data generated by the sensor cube that was roped into the hole by our dedicated colleagues. We captured some great images in the process.
SherpaTT and the avionics box also worked great today and DFKI and GMV were pleased with the results of today's experiment day. For tomorrow, we hope that the sandstorms will be gone, and we can perform more experiments with all systems.






January 31st, 2023
Broken Leg and Autonomous Rovers
The sixth day with experiments of our field trials started with great weather – all sunny and no wind. Today, our experiments focused on calibrating the Ground-penetrating radar (GPR) on Coyote III and further exploration and mapping tests with LUVMI-X.
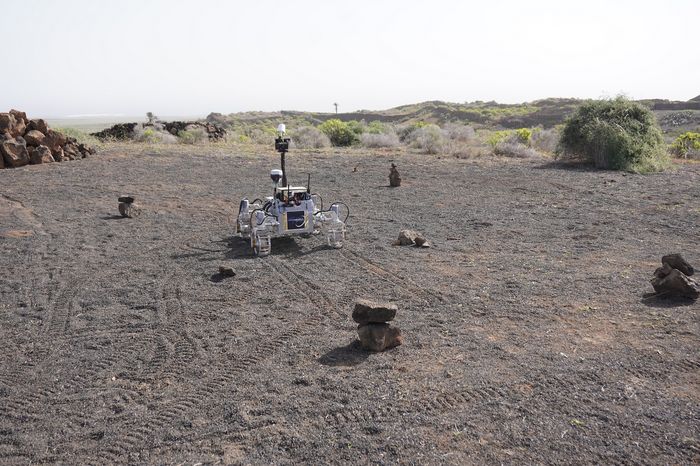
LUVMI-X worked like a charm, and we were able to demonstrate true autonomy in the field. Our colleagues manipulated the terrain a bit, placing small stone towers that posed no problem for LUVMI-X's visual odometry. The rover navigated safely through the field without human intervention.
Our colleagues from LATMOS conducted further calibration tests with Coyote III and took it into the cave for the first time. Tomorrow, they will perform more experiments and bury metallic nodes in the ground to test the GPR's capabilities.
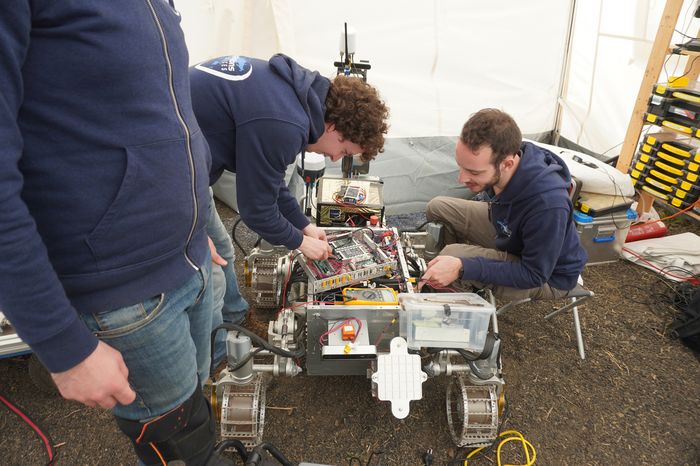
For SherpaTT, our team worked on improving the software. During one of the experiments with the rover, we also discovered a large crack on one of the legs. The leg had probably been damaged during an experiment before the field tests in Lanzarote. Luckily, we had the right spare parts with us, and our mechanics Tobi, Chris and Felix were able to repair it within three hours. During the night shift, Jonathan and Tobi performed some tests on the leg to ensure it was functional for the next day.
In the evening we were confronted with a natural phenomenon called "Calima" - strong winds carry dust from the Sahara over the Canary Islands. Our visibility was severely limited, and we expect increased dust levels tomorrow ...






January 30th, 2023
Arrival Day 2.0
After a short rain shower in the morning, we doubted at first that it would be possible to conduct any experiments – luckily the sky cleared up afterwards and we had almost perfect weather for the rest of the day.
There were some personnel changes at the test site today. A handful of people left us over the weekend, but we also had a lot of new people join us: the entire team from LATMOS joined today, along with some new colleagues from Magellium.
LUMVI-X could be fixed with the spare parts and got back to the operational stage rather quickly. We had some very successful experiments during the day regarding mapping and exploration with LUMVI-X. Hopefully we will be able to continue with them tomorrow.
The LATMOS team assisted our DFKI team in integrating the ground penetrating radar (GPR) on Coyote III and we expect the first experiments tomorrow. SherpaTT was mechanically stable, but we were not able to demonstrate autonomous navigation and mapping today.
To end the day on a good note Thomas organized a paella and sangria evening – we are all looking forward to a first joint event with the newcomers.



January 28th/29th, 2023
Depending on their qualifications and responsibilities, the weekend offered very different highlights to the CoRob-X team members: While some of us could take a break and enjoy the spectacular landscape and attractions of Lanzarote, others had to toil at the camp to fix things that got broken during the first week of field trials.
Jorge and Raquel from GMV spent long hours identifying and fixing a hardware bug in the avionics box. The pan-tilt unit for the stereo cameras would not work because a cable connection was broken. Fortunately, with the support of DFKI’s master-of-hardware, Tobi, the error could be identified and fixed. The avionics box can now again do what it is supposed to do, i.e., collect sensor data and run the software that enables SherpaTT to act autonomously.
Another, even more serious problem was related to the robotic arm mounted on SherpaTT. After the cracks in the arm’s carbon-composite elbow could be fixed with glue, pipe-clamps, and a lot of hot air from a portable electric heater, one of the joints stopped working. Without the guidance of Sherpa’s arm, rappelling Coyote into the skylight would be very difficult if not impossible. Obviously, the team got a bit nervous and immediately started to search for and repair the error. Only after some long hours, updates of software drivers and exchange of electronics components, a very relieved DFKI repair team could convince the arm to flex its electric muscles again. Let’s hope that it stays that way until Mission Phase 3 is successfully completed.
Overall, the weekend helped both humans and robots to recharge their batteries and assemble the energy and determination that will be needed to successfully complete the coming, second week of the Lanzarote field trials.





January 27th, 2023
Flash Flood Friday
We have completed the first week of the CoRob-X field trials just now. Once again, we had bad luck with the weather conditions. It rained most of the day and we couldn't get our rovers out in the field today. Our team has already gained a lot of experience, so covering the non-waterproof robots against the rain was done in no time ...
We also encountered more serious problems today: During an experiment with the TMDS (Tether Management and Docking System) deployment, SherpaTT accidentally pushed the TMDS into the ground. Fortunately, we are working on loose soil and the TMDS is still intact. However, Sherpa's manipulator arm was significantly damaged and our mechanics will need to work on the arm over the next few days to make it functional again.
It was not just the DFKI team that was affected by technical problems. LUVMI-X also had problems with its power supply, so that our colleagues from Space Applications could only conduct some experiments in the morning and had to spend the rest of the day with repairs. Currently, the team is waiting for a replacement part – hopefully it will arrive on Monday so they can perform further tests for the first and second mission phase.






January 26th, 2023
Rise of the Rappelling Rovers
We could conduct further tests with all systems today. We tested the rappelling maneuver with SherpaTT and Coyote III two more times. The rappelling was quite successful, and Coyote III could safely reach the bottom of the cave. However, we lost connection between SherpaTT and the TMDS in the process. While I (Tom) am writing this blog, we are trying to shift the TMDS control from SherpaTT to Coyote III. Further trials with LUVMI-X have been performed by Magellium and Space Applications while Jonathan and Leon tried to deploy the TMDS with SherpaTT.
Another good news was that we felt like our waste separation system on the site is finally accepted and our recycling rate has increased significantly... Lanzarote is a small island and we want to leave the test site as clean as possible.




January 25th, 2023
Action at the Cave
Another day at the site. It is slightly colder and once again very windy at the camp site, but for some reason less dust covers our laptops and crew so far.Our mechanics Tobi and Christopher did an outstanding job and managed to fix all problems on SherpaTT and Coyote III with another late-night shift.
We picked up where we stopped yesterday and performed several new trials for the rappelling maneuver. I (Tom) created a short video of one attempt that shows the perspective from below and above. We are still securing Coyote with a rope. Steffen, our master of rappelling, acts as a safety anchor. He controls the speed of the rappelling and prevents Coyote from falling into the cave.
Our colleagues from SINTEF performed some initial experiments with the time-of-flight (ToF) cameras at the cave entrance and collected data for further experimentation. The cameras are later used by the robot to collect data in the cave, which is used to create a map of the environment that allows it to navigate.
Space Applications and Magellium conducted numerous maneuvers with the LUVMI-X system today to test the collaborative mapping and exploration. After some initial sensor calibration, they were able to pull off some good sessions.






January 24th, 2023
Experiments Ahead!


With all systems unpacked and already tested, we could start into the first round of experiments. The goal for today was to perform tests for the upcoming mission phases two and three: The deployment of the sensor cube and the rappelling into the entrance of the lava cave, the so-called skylight.
Fortuna was on our side and we got almost perfect test and working conditions for the experiments. It was quite windy and sunny without a single drop of rain today.
After the initial morning briefing, done by Alexander and Thomas, the first action today was the sensor calibration of SherpaTT, done by DFKI and our colleagues from Magellium.
Our partners from Space Applications deployed a rope winch above the crater in order to perform first experiments with the sensor cube, that will identify the best place for Coyote III to rappel down the skylight in the lunar mission.
Probably the most spectacular experiment was the first attempt of the rappelling maneuver of SherpaTT and Coyote III. With almost all mission participants watching our first try, we had a lot of pressure. In the end, we managed to dock Coyote to the Tether-Management & Docking System (TMDS) and approached the skylight, but we couldn’t release the rope properly.
Our colleagues Tobi and Christopher will spend the night at the camp and try to fix the TMDS, so that we can perform a more successful experiment tomorrow. Fingers crossed that our engineers will get the job done tonight.




January 23rd, 2023
Release the Rovers!
Today marked the official start of our field trials on Lanzarote 2023. After setting up the camp yesterday, we were able to release our three robotic exploration systems DFKI’s SherpaTT, and Coyote III as well as LUVMI-X from Space Applications. We had a rainy night, so we were forced to work on wet ground again. The wind is still strong and we are struggling with sand that is constantly blown into our tent (and our laptops ;-)).
Today the teams from Space Applications, Magellium, SINTEF and GMV joined us at the campground. After an initial check of our systems, we found that we were having some issues with SherpaTT and Coyote III regarding our network structure at the site. Some of our colleagues have decided to stay on site and work on these issues – we will report on this tomorrow.
In the evening Christopher and I (Tom) prepared dinner for the crew and brought it to the site along with a few beers :-)







January 22nd, 2023
Lanzarote has once again given us some rough weather. Although it was technically 20°C, we constantly struggled with heavy rain and wind.
Today has probably been the most physically demanding day so far – our ambitious goal for the day was to set up all three tents as well as the electrical infrastructure. The biggest challenge we faced was setting up the two larger tents - in strong winds and gusts of rain... Each of the tents required the full concentration of the DFKI team, but fortunately our colleagues from Magellium and SINTEF were already on site and were able to help us.
We were happy that the two tents will house our crew, systems, and tools for the next three weeks. Another, smaller tent will serve as a community tent where participants can refresh themselves with drinks and snacks and spend time together.
Our on-site coordinator, Conny Spellbrink, gave our team a detailed tour of the cave, which we will explore with our robotics team over the next few weeks. The cave and tunnels were formed centuries ago by volcanic activity. They are the ideal environment for our lunar analog mission.








January 21st, 2023
Our journey finally begins. Today, the entire DFKI crew arrived on Lanzarote for the field tests in the CoRob-X project. Our scouts Thomas Vögele and Tobias Stark already arrived on Tuesday to deal with the local authorities. The rest of the crew consists of Alexander Dettmann, Tom Becker, Jonathan Babel, Steffen Planthaber, Christopher Schulz, Leon Cedric Danter and Raul Dominguez.
Due to bad weather in Frankfurt, our flight was delayed by about two hours, but we arrived in Lanzarote early enough to make a first visit to the test site with the whole crew. To be honest, we had expected it to be a bit warmer and sunnier – but I guess we will soon get used to the windy weather.
We used the remaining hours of daylight to do a first inspection of the campsite. Our head of logistics and camp planning Tobi had a very ambitious plan for setting up the whole camp for the next day. According to the weather forecast, it should be less windy and rainy...




January 20th, 2023


They finally arrived! After they have been at sea for almost three weeks we are happy to be able to greet our two blue containers at their point of destination, here on the lava soil of Lanzarote. Thanks to Julian from Seacon Logistics and Simon from Cargo Lanzarote who delivered our babies on time and with professional nonchalance.
The containers look un-harmed and a first check inside revealed that all the equipment seems to have survived the trip. So far, so good! Tomorrow we will start to unpack and set up camp. Our colleague Tobi can’t wait to get the tents up. That is, if the high winds don’t force us to wait for the rest of the team which will arrive Saturday afternoon.
December 2022 - Preparations and Packing
Packing days at the DFKI in Bremen: In preparation for the analog test on Lanzarote, we had to pack the entire equipment including the two robot systems "SherpaTT" and "Coyote III". A total of 822 items had to be stored in 50 different boxes to fit into two shipping containers. Within one week, everything had to be packed into individual boxes according to our lists. Additional help was provided by the industrial packaging service of Roland Industrieverpackungen from Bremen to pack everything seaworthy. Around 2.8 tons of equipment and systems were moved during these days in December. Two days of packing were documented and captured in two time-lapse videos:


September 2022 - Integration Weeks at the DFKI in Bremen
The first Milestone of the field tests has been reached: Between September 19th and 29th 2022,our CoRob-X project partners visited us in Bremen to integrate and test the software and hardware systems developed in CoRob-X in the brand-new test facilities of the DFKI. At the subsequent Technology Readiness Review, we received the thumbs up from the Scientific Advisory Board to carry out the analog mission on Lanzarote.We are more than happy that the many hours of intensive research and development work have paid off and are very much looking forward to the field tests on the Canary Island.