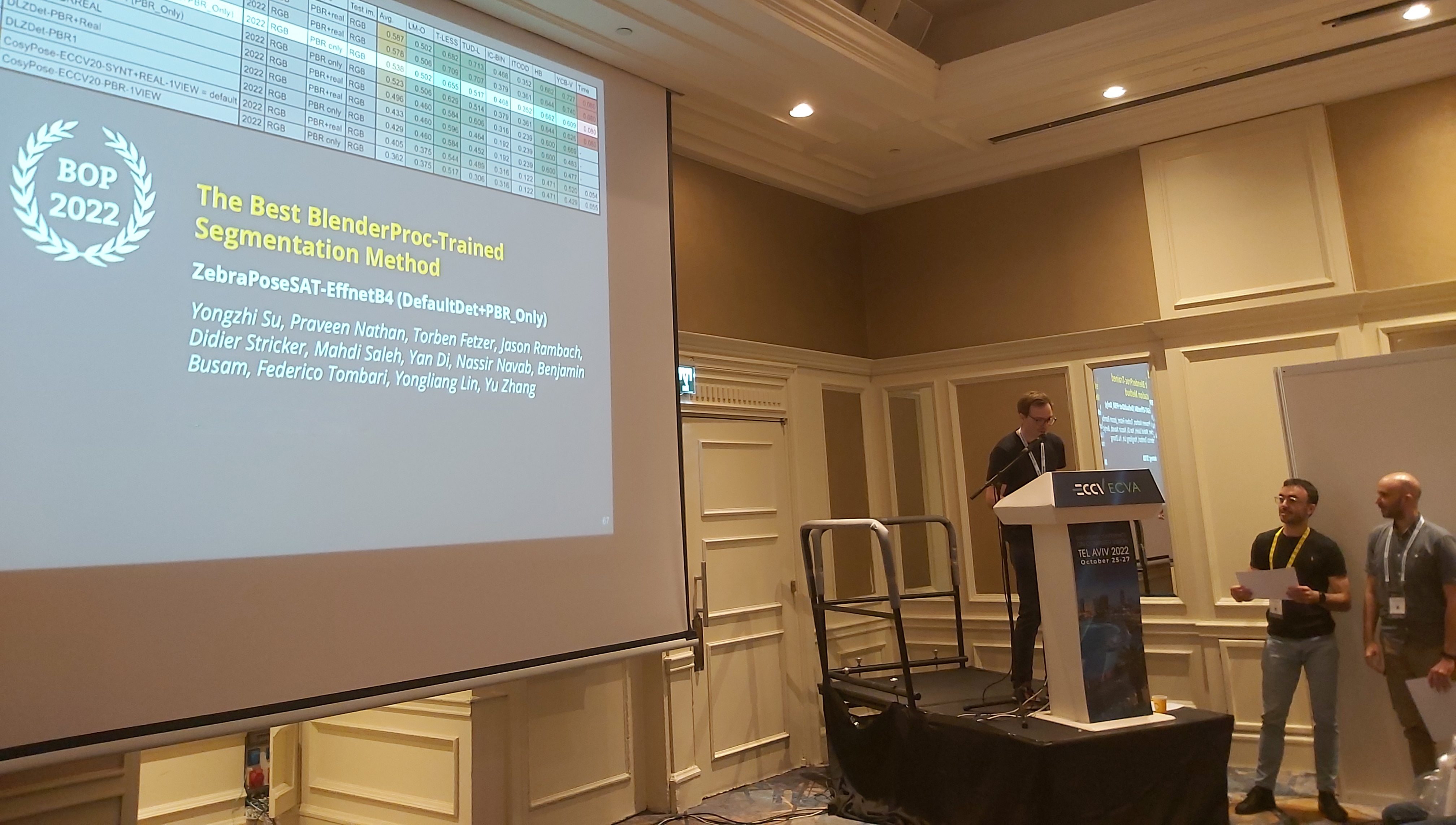
Der BOP-Benchmark und die BOP-Challenge befassen sich mit dem Problem der 6-Grad-Freiheitsgrad-Objektposenschätzung, die für viele Anwendungen wie das Greifen von Robotern oder Augmented Reality von großer Bedeutung ist. Dieses Jahr fand der BOP-Wettbewerb im Rahmen des Workshops „Recovering 6D Object Pose“ auf der European Conference on Computer Vision (ECCV) in Tel Aviv, Israel statt. Unter den Gewinnerteams des BOP-Wettbewerbs wurde ein Preisgeld in Höhe von insgesamt 4000 $ verteilt, das von Meta Reality Labs und Niantic gestiftet wurde.
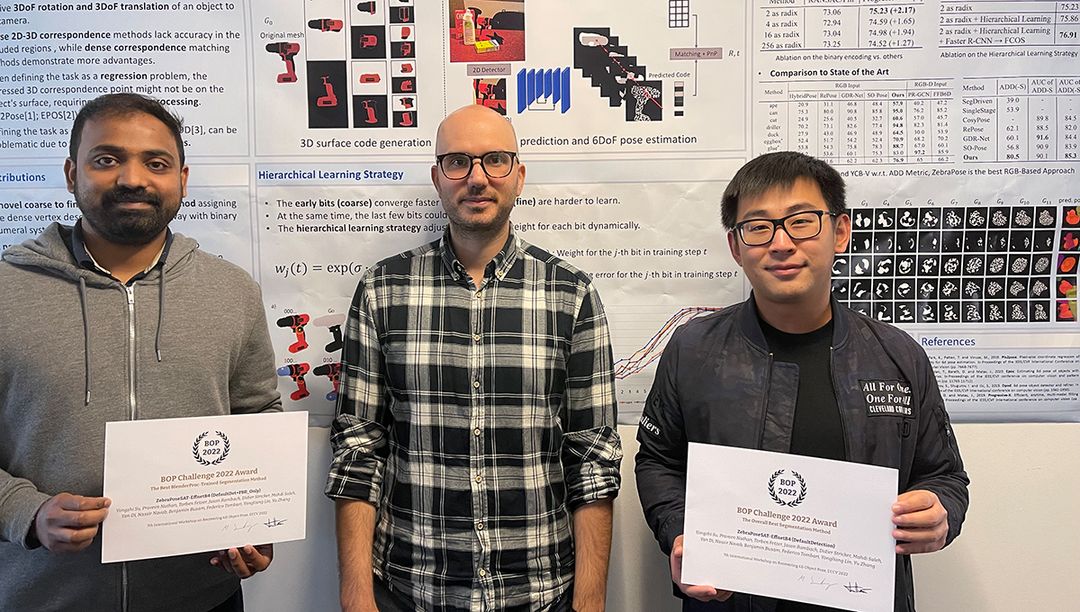
Die Preise wurden von Dr. Jason Rambach im Namen des DFKI-Teams entgegengenommen und es folgte eine kurze Präsentation der Methode. Die Gewinnermethode basierte auf dem CVPR 2022 Paper „ZebraPose“.
ZebraPose: Coarse to Fine Surface Encoding for 6DoF Object Pose Estimation Yongzhi Su, Mahdi Saleh, Torben Fetzer, Jason Raphael Rambach, Nassir Navab, Benjamin Busam, Didier Stricker, Federico Tombari
Der preisgekrönte Ansatz wurde von einem Team unter der Leitung des DFKI-Forschungsbereichs entwickelt, an dem auch Forscher der TU München und der Zhejiang Universität beteiligt waren.