Als interdisziplinärer Forschungsbereich gehört die Robotik zu den bahnbrechendsten Wissenschaftsfeldern unserer Zeit und hat in den vergangenen Jahren große Fortschritte sowohl seitens der Hardware als auch der Software erzielt. Dank komplexer Sensorik und Aktorik, Leichtbauweise sowie hochentwickelter Lern- und Planungsalgorithmen lassen sich schon heute Systeme realisieren, die eigenständig komplexe Aufgaben lösen und dabei sicher mit dem Menschen und ihrer Umgebung interagieren können. Einem breiten praktischen Einsatz in den zahlreichen Anwendungsfeldern stehen jedoch noch immer viele ungelöste Fragestellungen und Probleme entgegen. Mit dem Ziel, die Robotik-Forschung durch neue wissenschaftliche Erkenntnisse entscheidend voranzubringen, publizierten Forschende des DFKI Robotics Innovation Center auch 2021 die Ergebnisse ihrer Arbeiten in einigen der bedeutendsten und meistzitierten Journals ihrer Fachdisziplin sowie im Rahmen der wichtigsten Robotik-Konferenzen.
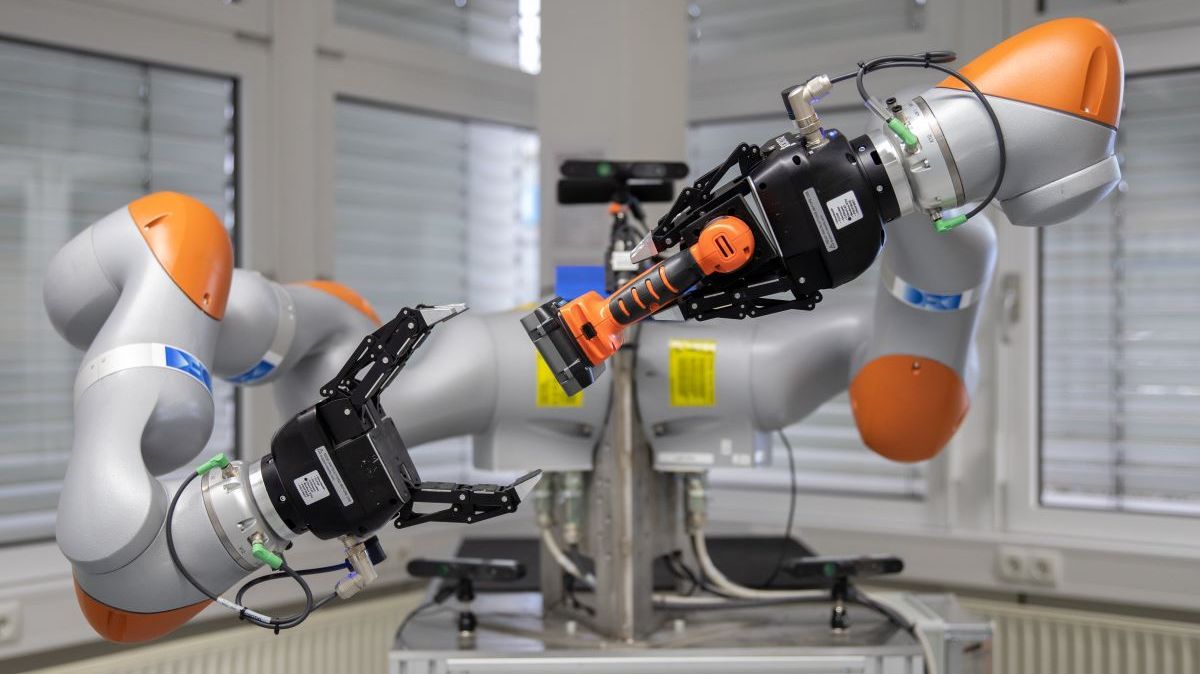
Learning context-adaptive task constraints for robotic manipulation – Dennis Mronga, Frank Kirchner
Sogenannte Constraints (zu Deutsch: Einschränkungen) spielen in der Robotik eine wichtige Rolle: Sie dienen dazu, die Bewegungsmöglichkeiten eines Roboters so einzuschränken, dass die korrekte und sichere Ausführung einer gewünschten Bewegung gewährleistet ist. Constraint-basierte Steuerungsansätze bieten eine flexible Möglichkeit, Manipulationsaufgaben zu spezifizieren und auf Robotern mit vielen Freiheitsgraden auszuführen. Allerdings erfordert die Spezifikation der aufgabenbezogenen Constraints in der Regel einen menschlichen Experten und führt häufig zu maßgeschneiderten Lösungen für spezifische Situationen. In ihrem Paper präsentieren die Forscher einen innovativen Ansatz: mithilfe maschineller Lernverfahren lassen sich aufgabenbezogene Constraints automatisch aus den Trainingsdaten ableiten und an nicht vorhergesehene Situationen anpassen. Der Ansatz wurde anhand drei verschiedener Zwei-Arm-Manipulationsaufgaben auf einem Industrieroboter evaluiert. Es zeigte sich, dass er hinsichtlich der Reproduktionsgenauigkeit in unvorhergesehenen Kontexten besser abschneidet als vergleichbare Ansätze.
Der Beitrag ist erschienen in: Robotics and Autonomous Systems, Elsevier, volume 141, pages 103779-103779, 2021. [PDF]
Active Exploitation of Redundancies in Reconfigurable Multi-Robot Systems – Thomas Röhr
Rekonfigurierbare Multi-Robotersysteme, die aus mehreren kooperierenden Robotern bestehen, bieten den Vorteil, dass sie physische Ressourcen wie Sensoren, Aktoren oder Akkumulatoren je nach Bedarf gemeinsam nutzen und verlagern können. Dank dieser Flexibilität lassen sich Systemredundanzen den aktuellen Aufgaben entsprechend aktiv verwalten, wodurch mehr Optionen zur Verfügung stehen, um auf Fehlerereignisse zu reagieren. In seinem Paper stellt der Forscher ein Organisationsmodell als Grundlage für die Planung mit rekonfigurierbaren Multi-Robotersystemen vor. Dieses ermöglicht die Ausnutzung von Redundanzen, um die Überlebenswahrscheinlichkeit des Systems in Bezug auf eine bestimmte Mission zu erhöhen. Der daraus resultierende Planungsansatz wägt Sicherheit gegen Effizienz bei den Roboteroperationen ab und bietet so ein Werkzeug zur Gestaltung und Verbesserung von Multi-Roboter-Missionen.
Das Paper ist erschienen in: IEEE Transactions on Robotics, IEEE, volume n.n., pages 1-17, Jun/2021. [PDF]
Nth Order Analytical Time Derivatives of Inverse Dynamics in Recursive and Closed Forms – Shivesh Kumar, Andreas Müller (Johannes-Kepler-Universität)
Ableitungen von Bewegungsgleichungen, die das dynamische Verhalten mechanischer Systeme beschreiben, gewinnen in der Robotik zunehmend an Bedeutung und finden vielfach bei der Konstruktion und Steuerung von Robotersystemen Anwendung. Die Steuerung von Robotern und insbesondere von Mehrkörpersystemen mit elastischen Komponenten erfordert nicht nur glatte Trajektorien, sondern auch die zeitlichen Ableitungen der wirkenden Kräfte/Drehmomente. In ihrem Paper stellen die Forschenden neuartige Zeitableitungen n-ter Ordnung für Bewegungsgleichungen sowohl in geschlossener als auch in rekursiver Form vor. Während die erste Form direkten Einblick in die Struktur der Ableitungen gibt, ermöglicht die zweite Form eine hocheffiziente Implementierung für Robotersysteme mit vielen Freiheitsgraden.
Das Paper ist erschienen in: 2021 IEEE International Conference on Robotics and Automation (ICRA), (ICRA-2021), 30.5.-05.6.2021, Xi'an, IEEE, Jun/2021. IEEE. [PDF]
Design, Analysis and Control of the Series-Parallel Hybrid RH5 Humanoid Robot – Julian Eßer, Shivesh Kumar, Heiner Peters, Vinzenz Bargsten, José de Gea Fernández, Carlos Mastalli (Alan Turing Institute at the University of Edinburgh), Olivier Stasse (GEPETTO group at LAAS-CNRS), Frank Kirchner
Der Aufbau eines humanoiden Roboters gehört zu den anspruchsvollsten Disziplinen in der Robotik. In ihrem Paper präsentieren die Forscher den am Robotics Innovation Center entwickelten humanoiden Roboter RH5 erstmals der internationalen Fachcommunity. Anders als viele existierende zweibeinige Roboterdesigns, die auf baumartigen kinematischen Ketten basieren und daher tendenziell eher sperrig sind, zeichnet sich RH5 durch ein hybrides seriell-paralleles Design aus. Bei einer Größe von 2 Metern ist der nur 62,5 Kilogramm leichte Roboter in der Lage, schwere dynamische Aufgaben mit 5 Kilogramm Nutzlast in jeder Hand auszuführen. Die Analyse und Regelung des Humanoiden erfolgt mittels Ganzkörper-Trajektorienoptimierung auf Grundlage der differenziellen dynamischen Programmierung (DDP). In ihrem Beitrag stellen die Forschenden einen verbesserten DDP-Algorithmus vor, der in der Lage ist, physikalisch konsistente Lauftrajektorien für den Humanoiden zu generieren.
Das Paper ist erschienen in: 2020 IEEE-RAS 20th International Conference on Humanoid Robots (Humanoids), (Humanoids-2020), 19.7.-21.7.2021, Munich/Virtual, IEEE, pages 400-407, Jul/2021. [PDF]
Learning initial trajectory using sequence-to-sequence approach to warm start an optimization-based motion planner – Sankaranarayanan Natarajan
Das Planen von Bewegungen ist ein zentrales Thema der Robotik. Unter Berücksichtigung des Robotermodells gilt es, für einen Roboter einen kollisionsfreien Weg von einer vorgegebenen Start- zu einer Zielkonfiguration zu finden. Optimierungsbasierte Bewegungsplaner liefern glatte und lokal optimale Trajektorien auch für komplexere Planungsprobleme. Dabei ist die Wahl der Anfangstrajektorie entscheidend. In seinem Paper stellt der Forscher ein auf einem neuronalen Netz basierendes Verfahren zur Vorhersage einer Anfangstrajektorie für einen optimierungsbasierten Bewegungsplaner vor. Dieses nutzt die Leistungsfähigkeit der bisher vorrangig im Bereich der Sprachverarbeitung angewendeten Sequenz-zu-Sequenz-Lernmethode. Das vorgeschlagene Modell erlernt die Zuordnung zwischen den Aufgaben und den optimalen Trajektorien aus einer Datenbank und wird anhand der Bewegungsplanung für einen Manipulator mit 6 Freiheitsgraden in zwei verschiedenen Umgebungen evaluiert. Die Ergebnisse zeigen, dass durch die Verwendung der vorhergesagten Anfangstrajektorie eine signifikante Verbesserung der optimierungsbasierten Bewegungsplanung selbst in einer unbekannten Umgebung erreicht wird.
Das Paper ist erschienen in: 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems, (IROS-2021), 27.9.-01.10.2021, Prague/Virtual, o.A., Sep/2021. [Link]