Robotische Systeme sind heute aus Fabriken und Produktionshallen nicht mehr wegzudenken. Zudem bergen sie großes Potential, wenn es darum geht, Menschen im Alltag, bei der Arbeit in lebensfeindlichen Umgebungen oder bei der Erkundung der Weltmeere und des Weltraums zu unterstützen. Allerdings erfordert die Vielfalt der Anwendungen immer komplexere und leistungsfähigere Roboter, deren Entwicklung die Beteiligung von Fachkräften unterschiedlichster Disziplinen voraussetzt: von Mechaniker*innen und Konstrukteur*innen über Elektrotechniker*innen bis hin zu Informatiker*innen und Expert*innen für Künstliche Intelligenz. Dies stellt insbesondere für kleine und mittelständische Unternehmen ein Problem dar, die sich weder die notwendige Expertise noch die kostspielige Anschaffung der Systeme leisten können.
Eine deutlich vereinfachte und optimierte Roboterentwicklung verspricht die vom DFKI Robotics Innovation Center im Projekt Q-Rock entwickelte, innovative Lösung. Diese soll es künftig auch unerfahrenen Anwender*innen erlauben, auf den eigenen Bedarf zugeschnittene Roboter zu konzipieren. Der Ansatz basiert auf einem theoretischen Modell, das den Systementwurf durch einen ganzheitlichen Prozess realisiert: Zum einen ist der Roboter selbst in der Lage, die ihm aufgrund seiner Hardware zur Verfügung stehenden Fertigkeiten zu erkunden. Zum anderen lassen sich für eine gegebene Aufgabe alle Systeme ermitteln, die über die zur Erfüllung der Aufgabe notwendigen Fähigkeiten verfügen. Dafür kombinierten die Bremer Forscher*innen erfolgreich subsymbolische Methoden der Künstlichen Intelligenz wie Maschinelles Lernen mit symbolischen Verfahren wie strukturellem Schlussfolgern. Zudem baut das Projekt auf der umfangreichen Datenbasis des Vorgängerprojekts D-Rock auf. Die Datenbank verbindet modellierte Software mit Hardware- und Verhaltensmodellen und wurde in Q-Rock stetig erweitert. Darüber hinaus unterstützt sie durch umfassende Modularisierung – d.h. die flexible Nutzung und effiziente Wiederverwendbarkeit von Komponenten – die Roboterentwicklung.
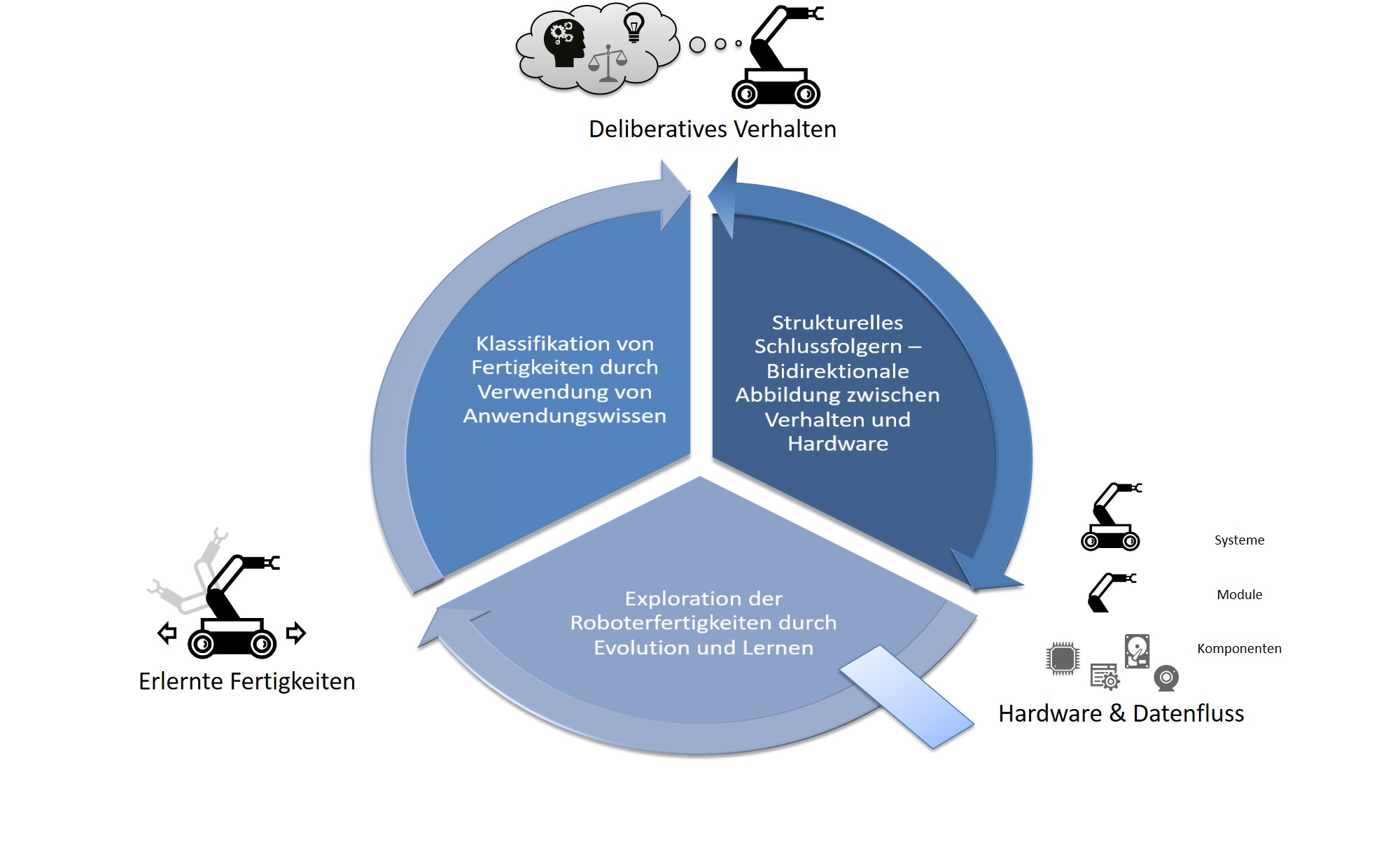
Ausgehend von der modularen Beschreibung eines Roboters erfolgt die Erkundung der Systemfähigkeiten dank maschineller Lernverfahren vollkommen selbstständig. Bei sehr komplexen Systemen werden zunächst die Fähigkeiten von Teilkomponenten – z.B. eines einzelnen Sensors oder Gelenkes – ermittelt, um daraus die Fähigkeiten des Gesamtsystems abzuleiten. Mithilfe weiterer Verfahren des maschinellen Lernens und auf Basis der in der Datenbank enthaltenen Softwaremodelle werden die erlernten Fähigkeiten dann automatisch in funktionale Einheiten gruppiert. Zusammen mit einer semantischen Beschreibung ergeben sie sogenannte Kognitive Kerne, die als Bausteine für komplexere Verhalten dienen. Diese enthalten die Verbindung zwischen den Fähigkeiten einer Hardware – z.B. der Kinematik eines Roboterarmes – und der daraus resultierenden möglichen Bedeutung im Verhalten, etwa dem Greifen eines Objekts. Um sehr komplexes Roboterverhalten zu erzeugen, das aus vielen Einzelaktionen besteht, z.B. das Öffnen einer Tür, lassen sich verschiedene Kognitive Kerne miteinander kombinieren. Durch strukturelles Schlussfolgern können die Verhaltensbausteine dann wieder auf die Hardware abgebildet werden.
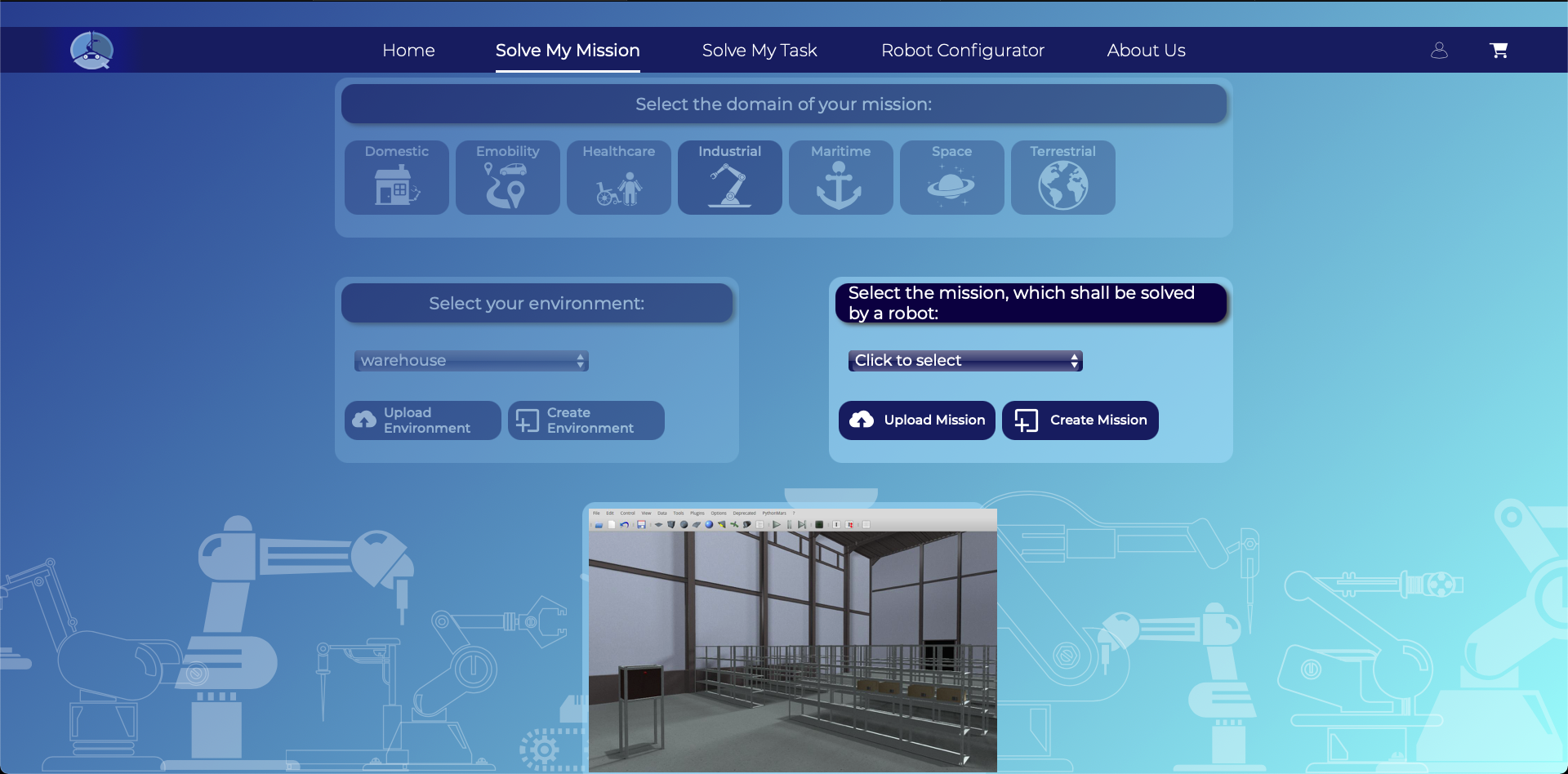
Für einen einfachen Zugang zum Q-Rock-System konzipierten die Wissenschaftler*innen des DFKI ein benutzungsfreundliches Webinterface. Dieses ermöglicht den Anwender*innen über eine Menüauswahl die vom Roboter zu erfüllende Aufgabe, Umgebungsbedingungen und Anforderungen an das Verhalten des Systems zu spezifizieren. Das Programm schlägt ihnen dann automatisch die passenden Hardwarekombinationen vor. Darüber hinaus können Nutzer*innen eigene Roboter aus den in der Datenbank enthaltenen Komponentenmodellen nach dem Baukastenprinzip erstellen. Durch die so angestoßene Exploration der Roboterfähigkeiten wird automatisiert ermittelt, welche Aufgaben das System aufgrund seiner Hardware ausführen kann. Auf diese Weise ist es Anwender*innen möglich, aus dem vollen Fähigkeitsspektrum des neudesignten Roboters zu schöpfen.
Prof. Dr. Dr. h.c. Frank Kirchner, Leiter des DFKI Robotics Innovation Center: „Q-Rock ist aus mehrfacher Hinsicht ein Erfolg: Zum einen ist uns durch die Kombination von symbolischen und subsymbolischen Methoden der Künstlichen Intelligenz ein wichtiger Schritt hin zu sogenannten ‚integrierten KI-Lösungen‘ gelungen. Zum anderen wird das neue System als Schlüsseltechnologie ganz neue Konstruktions- und Planungsprozesse für Roboteranwendungen realisierbar machen und Unternehmen den Einsatz robotischer Systeme ermöglichen, die sich dies aus Komplexitäts- und Kostengründen bisher nicht leisten konnten.“
Das BMBF förderte Q-Rock mit rund 3,17 Millionen Euro über eine Laufzeit von drei Jahren. Am 27. September 2021 wurde das Projekt dem Wissenschaftlichen Beirat (Scientific Advisory Board) des DFKI vorgestellt, und erhielt eine überaus positive Bewertung. Insbesondere wurde es für seinen revolutionären und ambitionierten Ansatz und die sehr guten Ergebnisse gelobt. Der Wissenschaftliche Beirat setzt sich aus international renommierten Forscher*innen zusammen. Er evaluiert in regelmäßigen Abständen den Fortschritt und Erfolg der vom BMBF geförderten Vorhaben des DFKI.
An das erfolgreich abgeschlossene Projekt knüpft das ebenfalls vom BMBF geförderte Vorhaben M-Rock des Robotics Innovation Center an. Das am 1. August 2021 gestartete Projekt will durch die Verwendung von expliziten und impliziten Feedback der Nutzer*innen die Roboterentwicklung weiter verbessern. So soll etwa die Verwendung der Elektroenzephalografie (EEG) des interagierenden Menschen bewirken, dass sich die Systeme noch besser an individuelle Anforderungen und Vorlieben anpassen.
Weitere Informationen:
zum Projekt Q-Rock
zum Projekt M-Rock

Maßgeschneiderte Roboter für alle – DFKI präsentiert wegweisende Lösung zur KI-basierten Systementwicklung
| Robotik | Robotics Innovation Center | Bremen | Pressemitteilung

Kontakt:
Prof. Dr. Dr. h.c. Frank Kirchner
- Frank.Kirchner@dfki.de
- Tel.: +49 421 17845 4101
Dr. Sirko Straube
- Sirko.Straube@dfki.de
- Tel.: +49 421 17845 6639
Pressekontakt:
Unternehmenskommunikation Bremen