Auf der Suche nach außerirdischem Leben und potenziellen Standorten für zukünftige Basislager sind in der Raumfahrt besonders die schwer erreichbaren Orte auf fremden Planeten von Interesse. Höhlen, Felspalten oder tiefe Krater bieten Schutz vor Strahlung, Meteoriten und Temperaturschwankungen und lassen auf lebensnotwendige Ressourcen wie Wassereis hoffen. Rover, d.h. rädrige Roboter, wie sie heute schon in planetaren Missionen eingesetzt werden, verfügen jedoch nicht über die notwenige Mobilität, um in solches Terrain vorzudringen. Aus diesem Grund sollen sie zukünftig von Systemen mit Beinen begleitet werden, die dank ihrer Flexibilität und Bewegungsfähigkeit auch steiles und zerklüftetes Gelände überqueren können. Jedoch fehlt es bisher an einem leistungsfähigen, speziell für Laufroboter entwickeltem Navigationssystem.
Diese Lücke will das im Januar 2021 gestartete Projekt ANT („Autonomous Non-Wheeled All-Terrain Rover“) schließen und vereint dafür die umfangreiche Expertise der Projektpartner in den Bereichen Weltraumrobotik, autonome Systeme und dynamische Laufroboter. Ziel des Vorhabens ist die Entwicklung eines neuartigen Navigationssystems, das mehrbeinigen Robotern das Manövrieren in anspruchsvollem Gelände wie Kratern oder Höhlen sowie an Abhängen oder Klippen ermöglichen soll. Dabei verfolgen die Partner einen modularen und generischen Ansatz, der den Systemeinsatz sowohl auf energieeffizienten vierbeinigen als auch statisch stabilen sechsbeinigen Roboter erlaubt – je nach den spezifischen Anforderungen künftiger Weltraummissionen.
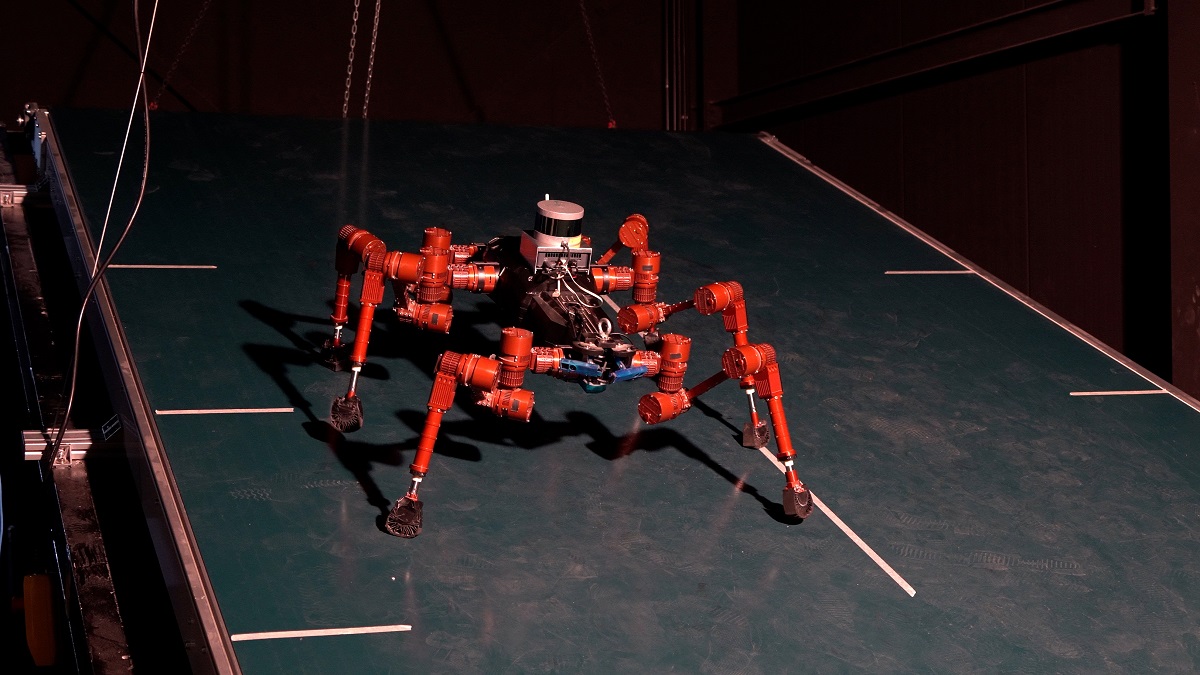
Dank des neuen Systems wird der Roboter in der Lage sein, das Gelände um ihn herum eigenständig wahrzunehmen, einen Weg zu einem gewünschten Ziel zu planen und die Ausführung der erzeugten Bewegungsabläufe so zu kontrollieren, dass die Stabilität auch in unbefestigtem, geneigtem und zerklüftetem Gelände gewährleistet ist. Als robotische Testplattform dafür dient der sechsbeinige Laufroboter CREX des DFKI Robotics Innovation Center. Dieser soll mithilfe des entwickelnden Navigationssystems die künstliche Kraterlandschaft in der Weltraum-Explorationshalle des DFKI in Bremen erklimmen, verschiedene Steigungen meistern und Hindernisse überwinden. Darüber hinaus wird das Kaufsystem AlienGo von UnitreeRobotics genutzt, um die Übertragbarkeit der ANT-Software auf ein vierbeiniges System zu testen und zu analysieren.
Das Projekt ist in vier Phasen aufgeteilt, in denen die Software stetig verbessert und mit immer mehr Funktionalitäten ausgestattet wird. Die erste Phase konnten die Forschenden bereits im September 2021 erfolgreich abschließen. Hierbei gelang es ihnen, mit CREX omnidirektionale Bewegungen in einer 20 Grad Schräge zu demonstrieren. Nun arbeiten sie daran, die sichere Navigation auf unebenem Untergrund zu realisieren. Dafür erstellt der Roboter eine genaue Karte seiner Umgebung und verwendet sie für die Planung der einzelnen Fußpunkte. Am Ende von ANT soll CREX schließlich in der Lage sein, im Krater eine unebene Schräge eigenständig zu bewältigen.

Fit für den Weltraum – DFKI entwickelt im Projektverbund innovatives Navigationssystem für Laufroboter
| Autonome Systeme | Robotik | Robotics Innovation Center | Bremen

Kontakt:
Weitere Informationen: