
Autonomous robotics for space exploration
Exploring the Moon, Mars, and other celestial bodies, as well as near-Earth orbit, represents one of the greatest scientific challenges of our time. Robots play a pivotal role in this endeavour, as they are capable of withstanding extreme environmental conditions, exploring regions that were previously inaccessible, and performing tasks that are either too dangerous or too complex for humans. However, the greater the distance from Earth, the higher the demands on their autonomy, as communication delays make direct control increasingly difficult.
 © DFKI, Florian Cordes
© DFKI, Florian CordesMobile robots for use on other planets and in orbit
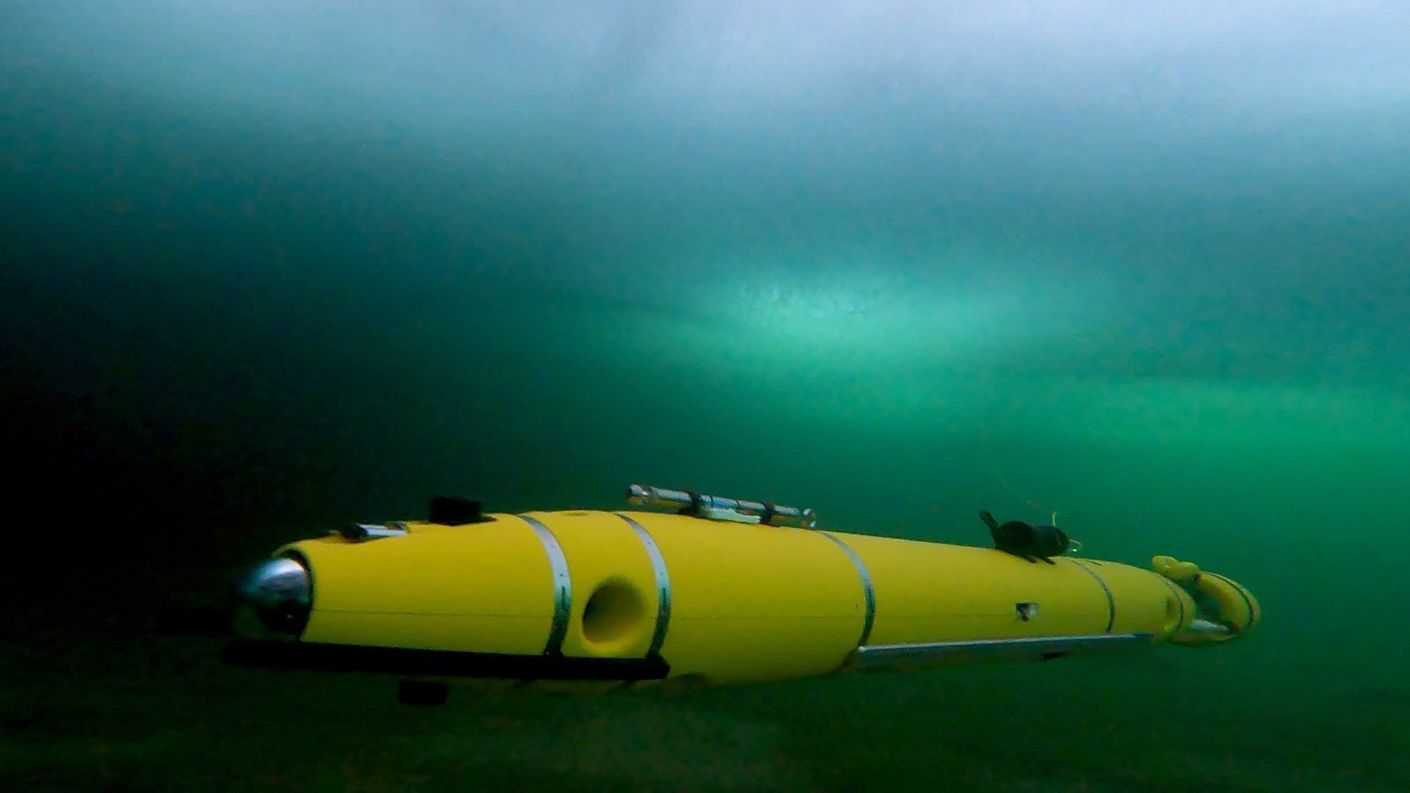
For over two decades, the DFKI Robotics Innovation Center in Bremen has been developing mobile systems capable of independently exploring alien planets and performing complex tasks, such as identifying scientifically relevant locations, collecting samples, conducting analyses, and constructing extraterrestrial infrastructures. These systems can operate alone or alongside other robots and humans, forming the basis for in-situ resource utilisation – the use of local resources for future missions. In addition to land-based rovers, the Bremen team is researching autonomous underwater vehicles that can navigate liquid habitats, such as the kilometre-thick ice layers beneath Jupiter’s moon Europa.
 © DFKI
© DFKI
"Autonomous robotics opens up the possibility of exploring worlds that would otherwise be difficult or highly risky for humans to reach alone. The reliability of individual systems is important, as is their ability to work in teams and collaborate with humans. These systems are designed to adapt flexibly to different mission conditions and maintain their performance over long periods of time – characteristics that are crucial to the success of future space missions."
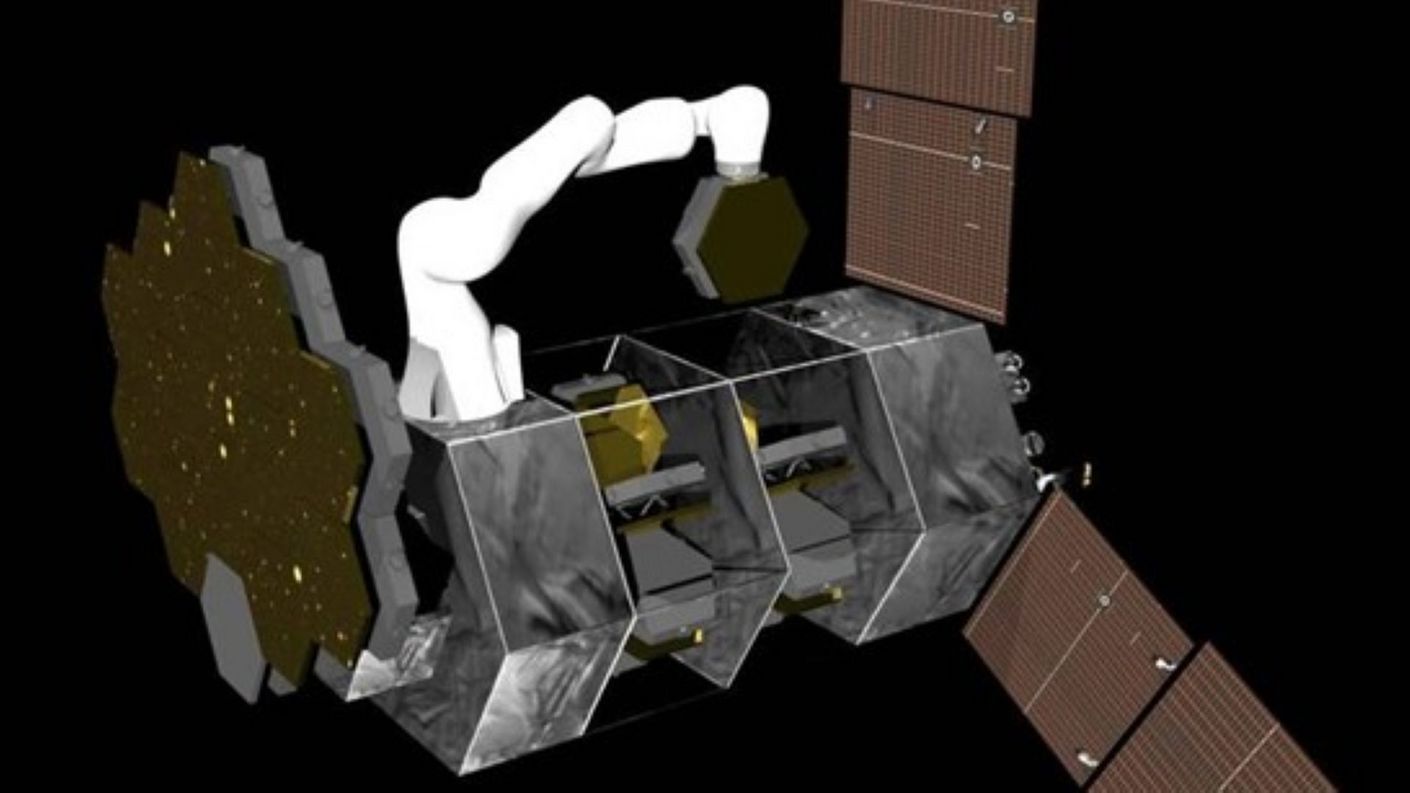
Autonomous robotics is also becoming increasingly important in near-Earth orbit. Satellites, space stations, and other platforms require regular inspection, maintenance, and repair – tasks that are becoming more challenging as the number of active satellites grows and the amount of space debris increases. To address these challenges, the researchers are developing modular and reconfigurable robotic systems that can be deployed flexibly. The focus is on robotic manipulators – remote-controlled or autonomous robotic arms that perform tasks in the field of in-orbit assembly and manufacturing (ISAM), such as assembling large orbital structures and carrying out maintenance and repair work on satellites and space stations. Another key research area is active space debris removal.
 © DFKI, Meltem Fischer
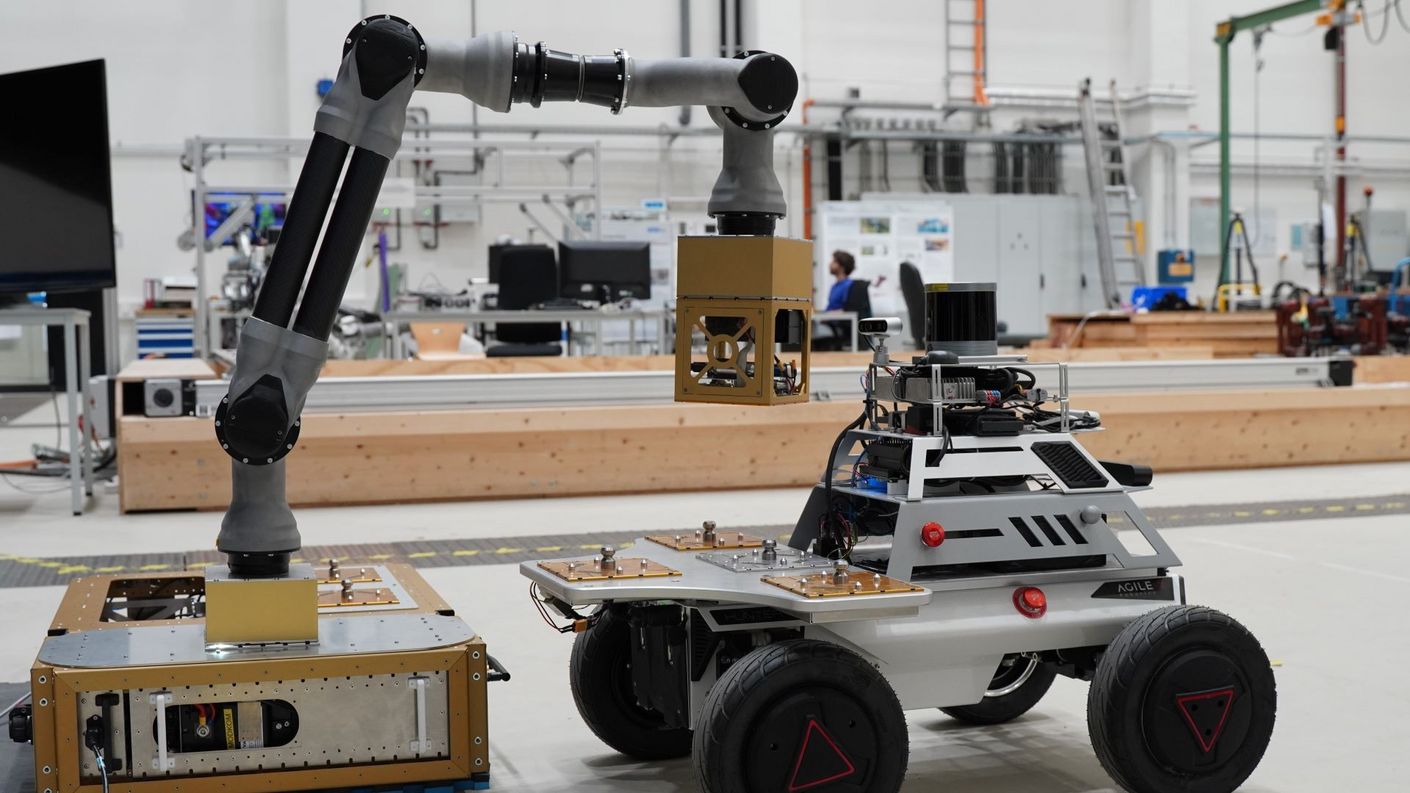
© DFKI, Meltem FischerVersatile and modular robotic platforms
Particular focus is placed on the development of versatile robotic platforms to meet various mission requirements, ranging from robust rovers and highly mobile walking robots to hybrid systems for planetary exploration. For orbital applications, the emphasis is on developing innovative manipulators, robotic modules, and standardized interfaces. These systems are designed to be modular, with components, sensors, and tools that can be flexibly exchanged or combined. This allows the same basic platform to be used for a wide range of tasks, including sampling, manipulation, and the construction of complex structures on planets and in orbit. Such a modular design reduces development times and costs while enabling rapid adaptation to new mission scenarios.
 © DFKI, Meltem Fischer
© DFKI, Meltem FischerAI for autonomy, robotic teams, and human-robot interaction
In addition to established control and navigation methods, AI approaches are becoming increasingly prevalent. Learning-based planning algorithms and machine learning techniques – particularly deep learning – enable systems to dynamically model their environment, detect obstacles in real time, and respond appropriately to different situations. This allows them to operate robustly even in unpredictable conditions and to minimise operational risks. AI-supported anomaly detection also helps identify deviations in system behaviour early and prevent failures.
Another key area of research is the collaboration of heterogeneous robot teams. By using sensor data fusion and AI-based coordination, these teams can exchange position and environmental information, synchronise their actions, and perform tasks jointly, even in dynamic, unstructured environments. The concept of ‘sliding autonomy’, which combines machine autonomy with human control, plays a particularly important role here. Robots carry out complex tasks independently, while humans make strategic decisions and intervene when necessary. Adaptive systems analyse sensor data from sources such as cameras, control consoles, and even biological signals, enabling them to adjust their behaviour to the situation and facilitating intuitive, context-dependent human-robot interaction.
 © DFKI, Tobias Stark
© DFKI, Tobias Stark
A glimpse into the future: quantum robotics for space applications
Building on these developments, the Robotics Innovation Center is also exploring future concepts in quantum robotics. The goal is to enhance the learning and decision-making capabilities of space robots over the long term. Traditional machine learning methods quickly reach their limits in complex environments because they require large amounts of data and long training times. Quantum algorithms offer new possibilities for processing and analysing data far more efficiently. Through this work, the Bremen team is pioneering research in a still young field that could significantly boost the performance of exploratory robotic systems during long-term operations.
Unique research and testing infrastructure for space robots
 © DFKI, Annemarie Popp
© DFKI, Annemarie PoppThe Robotics Innovation Center in Bremen features a highly specialized research and testing infrastructure that enables the practical development and evaluation of robotic systems under realistic conditions.
Test facilities:
- Crater landscape: Simulates Moon and Mars conditions, including slopes of up to 45°.
- Maritime Exploration Hall: Underwater and microgravity experiments with motion tracking.
- Virtual Reality Lab: Immersive environment for simulation, mission control, and teleoperation.
- ISO-compliant cleanroom: Hardware and electronics integration and quality control.
Further articles on space explorations
DFKI4Space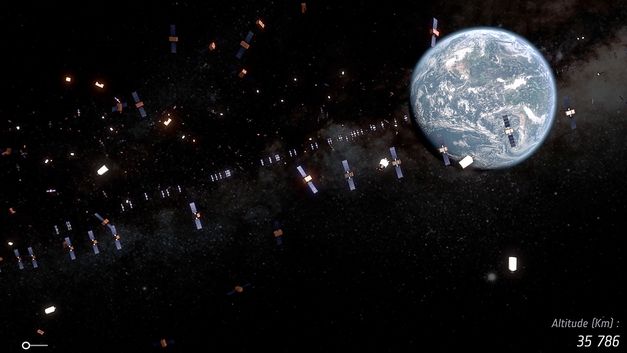




Unique research and testing infrastructure for space robots
© DFKI, Annemarie PoppThe Robotics Innovation Center in Bremen features a highly specialized research and testing infrastructure that enables the practical development and evaluation of robotic systems under realistic conditions. Systems, modules, and control units are tested iteratively to systematically increase their technology readiness and gradually adapt them to the requirements of planetary and orbital missions.
Test facilities:
- Crater landscape: Simulates Moon and Mars conditions, including slopes of up to 45°.
- Maritime Exploration Hall: Underwater and microgravity experiments with motion tracking.
- Virtual Reality Lab: Immersive environment for simulation, mission control, and teleoperation.
- ISO-compliant cleanroom: Hardware and electronics integration and quality control.
Field tests worldwide:
Testing under space-analog conditions on Earth, e.g., deserts, lava caves, or ice-covered waters.
ESA_Lab@DFKI – AI for space
 © ESA
© ESATo develop new AI technologies and applications for civil spaceflight, the European Space Agency (ESA) and the DFKI established the ESA_Lab@DFKI.
At the transfer lab in Kaiserslautern, researchers from both institutions work together on:
- AI systems for analyzing complex Earth observation data
- Solutions for satellite collision avoidance
This collaboration fosters a close exchange between research and practical space operations.