
DFKI auf der Hannover Messe 2022
Zweiarmiger Tauchroboter „Cuttlefish“
Interventions-AUV für die autonome Unterwassermanipulation
Das Robotics Innovation Center (RIC) erforscht Systeme und Konzepte für den Einsatz von Robotik in den verschiedensten Bereichen – unter anderem zur Unterstützung von Menschen in der Logistik und Produktion, zur Erkundung und Räumung von Gefahrengebieten und für Wartungsarbeiten in menschenfeindlichen Umgebungen wie der Tiefsee.
Von der Wartung maritimer Infrastrukturen über die Bergung von Munitionsaltlasten bis hin zur Beseitigung von Plastikmüll – viele Arbeiten unter Wasser sind nicht nur aufwendig und teuer, sondern bergen auch erhebliche Risiken für die Tauchenden, die sie durchführen. Ferngesteuerte Unterwasserfahrzeuge (ROVs) werden schon heute eingesetzt, um tiefe Gewässer zu erkunden und den Zustand maritimer Anlagen zu überwachen. Der Trend geht jedoch zum Einsatz autonomer Unterwasserfahrzeuge (AUVs), die über lange Zeiträume im Wasser verbleiben und dort dank Künstlicher Intelligenz (KI) komplexe Aufgaben bewältigen können.
Im Verbund mit einem weltweiten Netzwerk aus Partnern der Industrie und Wissenschaft arbeitet das DFKI Robotics Innovation Center an autonomen Unterwasserrobotern, die in einer durchgehenden Entwicklungskette vom Applikationskonzept über Simulation bis hin zu Laborversuchen in umfangreichen Testanlagen evaluiert werden. Regelmäßige Ausfahrten im Atlantik sowie in der Nord- und Ostsee garantieren eine anwendungsbezogene Leistungsbewertung. Diese einzigartige Kombination aus Laborinfrastruktur und Realmissionen ermöglicht die Entwicklung robuster und zuverlässiger Systeme, die dank der Anwendung Maschinellen Lernens sowie State-of-the-Art-Verfahren der Navigation den harschen Umgebungsbedingungen des maritimen Einsatzgebietes trotzen.
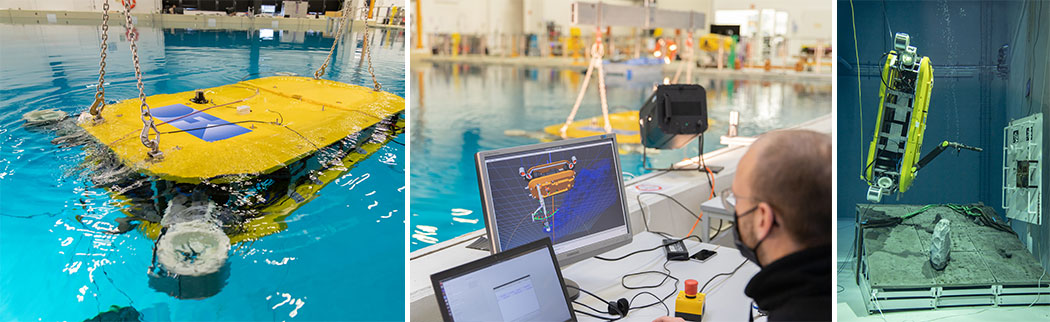
Ein zentrales Forschungsfeld und zugleich Zukunftsthema in der maritimen Robotik ist die Manipulation und Handhabung von Infrastrukturen und Operationsumgebungen durch autonome Roboter. Ein System, mit dem der DFKI-Forschungsbereich die teilautonome Unterwassermanipulation bereits erfolgreich demonstrieren konnte, ist das im Projekt Mare-IT entwickelte AUV „Cuttlefish“. Dieser frei in der Wassersäule positionierbare Interventionsroboter verfügt über zwei an der Bauchseite angebrachte, tiefseetaugliche Greifsysteme, mit denen er Objekte unter Wasser flexibel manipulieren kann. Dabei ist das innovative Fahrzeug in der Lage, den Schwerpunkt und Auftrieb während eines Tauchgangs zu verändern und beliebige Orientierungen einzunehmen und stabil zu halten. Neben dem vollautonomen Einsatz kann das AUV mittels einer Glasfaser in einem hybriden Modus betrieben werden, der das Eingreifen durch den Menschen erlaubt, etwa bei kritischen Operationen an Unterwasserstrukturen.
Mehr Informationen

Besuchen Sie uns:
30. Mai - 2. Juni 2022 in Hannover
Halle 2, Stand C39
