
Künstliche Intelligenz kann Meer
Wie das DFKI Plastikmüll in der Tiefsee und an der Wasseroberfläche bekämpfen will
Sowohl in Bremen als auch in Oldenburg arbeiten DFKI-Forschende an Methoden der Künstlichen Intelligenz, um Plastikmüll in den Weltmeeren zu reduzieren. Während sich die einen auf Robotik unter Wasser spezialisieren, fokussieren sich die anderen auf Müll, der an der Wasseroberfläche treibt.
Nach einer halben Stunde in eisiger Kälte ist Schichtwechsel. Dann kommt die Ablösung, blickt über die Bordwand des Eisbrechers hinunter auf das arktische Wasser und hält in den nächsten 30 Minuten lang Ausschau nach Müll, der an der Oberfläche vorbeischwappt. Das Zählen von Flaschen, Fischernetz-Fetzen, Deckeln und Tüten gehört zu den Aufgaben der wissenschaftlichen Crew während dieser Forschungsfahrt im Polarmeer nördlich von Spitzbergen. Tauchroboter unterstützen die Forschenden beim Monitoring und zählen unter Wasser weiter. In 1300 Metern Tiefe, bei 80 Grad Nord, sichtet das Unterwassergefährt schließlich eine schwimmende Plastiktüte. Drei Jahre liegt die Expedition mit der RV Polarstern zurück, aber an die Plastiktüte erinnert sich Marc Hildebrandt sehr genau. „Das war bestürzend“, sagt der DFKI-Wissenschaftler und Taucher.
Oft sind es Schlüsselerlebnisse, die Forschende wie Hildebrandt beflügeln, ihr Wissen und ihre Expertise in den Dienst des Meeres zu stellen, es weiter zu erforschen und zu schützen. Auch Oliver Zielinski hatte so ein Erlebnis. In Niedersachsen aufgewachsen, verbringt er Ende der 1970er, Anfang der 1980er Jahre seine Ferien oft an der Küste, wo man damals neben zahlreichen Muscheln manchmal auch kleine Ölklumpen am Strand findet. Später gibt es politische Abkommen zum Schutz des Meeres und Flugzeuge scannen die Nordsee nach Schiffen ab, die unerlaubt Öl ins Wasser lassen. Dieses Beispiel zeige, dass Dinge sich ändern lassen.

Wir können Zustände wissenschaftlich beschreiben, technisch messbar machen und gesellschaftlich verändern. Die Chancen stehen wirklich gut, mit KI zum Schutz der Meere beizutragen.
Beide Wissenschaftler, der Informatiker Dr.-Ing. Marc Hildebrandt sowie der Meeresphysiker Professor Dr. Oliver Zielinski, arbeiten am DFKI; wenn auch in verschiedenen Forschungsbereichen und an unterschiedlichen Projekten, der eine in Bremen und der andere in Oldenburg, aber sie verfolgen dieselbe Mission: Sie entwickeln Methoden der Künstlichen Intelligenz, die helfen sollen, die Plastikberge in den Weltmeeren, die über 70 Prozent der Erde bedecken und als globales Ökosystem überlebenswichtig sind, abzubauen. Sie streben nach ganzheitlichen Lösungen für einen verantwortungsvollen Umgang problematischer, weil meist kurzlebiger Plastikprodukte wie Verpackungsmaterial oder Einwegartikel. Ihre Idee von der Kreislaufwirtschaft erstreckt sich vom Produzenten bis zum Endverbraucher, von der Entwicklung bis zum Recycling. Während sich die Oldenburger darauf konzentrieren, Quellen von Plastik an der Oberfläche von Gewässern auszutrocknen, gehen die Bremer das Problem mit Tauchrobotern unter Wasser an.
Der Plastikmüll: Rund zehn Millionen Tonnen Plastikmüll landen jährlich in den Weltmeeren. Seinen Ursprung hat der Müll oftmals an Land und gelangt dann über Flüsse ins Meer, wo er sich nahezu überall nachweisen lässt: In fünf riesigen Strudeln im Pazifik, Atlantik und Indischen Ozean, in der Tiefsee und der Arktis, im offenen Meer, am Meeresboden und in Küstengewässern.
Grundsätzlich gilt, dass Plastik, das einmal ins Meer gelangt ist, sich unglaublich schwer wieder herausfischen lässt, unter Wasser ungleich schwerer als an der Wasseroberfläche. Ab 30 Metern Tiefe stoßen Tauchende an ihre Grenzen, in Druckanzügen ist bei maximal 450 Metern Schluss. Die Tiefsee, die unterhalb einer Tiefe von mindestens 200 Metern liegt und über 88 Prozent der Fläche in den Ozeanen ausmacht, gilt als menschenfeindlich, sie ist lichtlos und schlechter erforscht als der Mond. An der tiefsten Stelle, im Marianengraben östlich der Insel Guam am Rande des Pazifiks, reicht sie bis auf über 11.000 Meter hinab, durchschnittlich ist der Meeresboden immerhin etwa 4000 Meter tief.
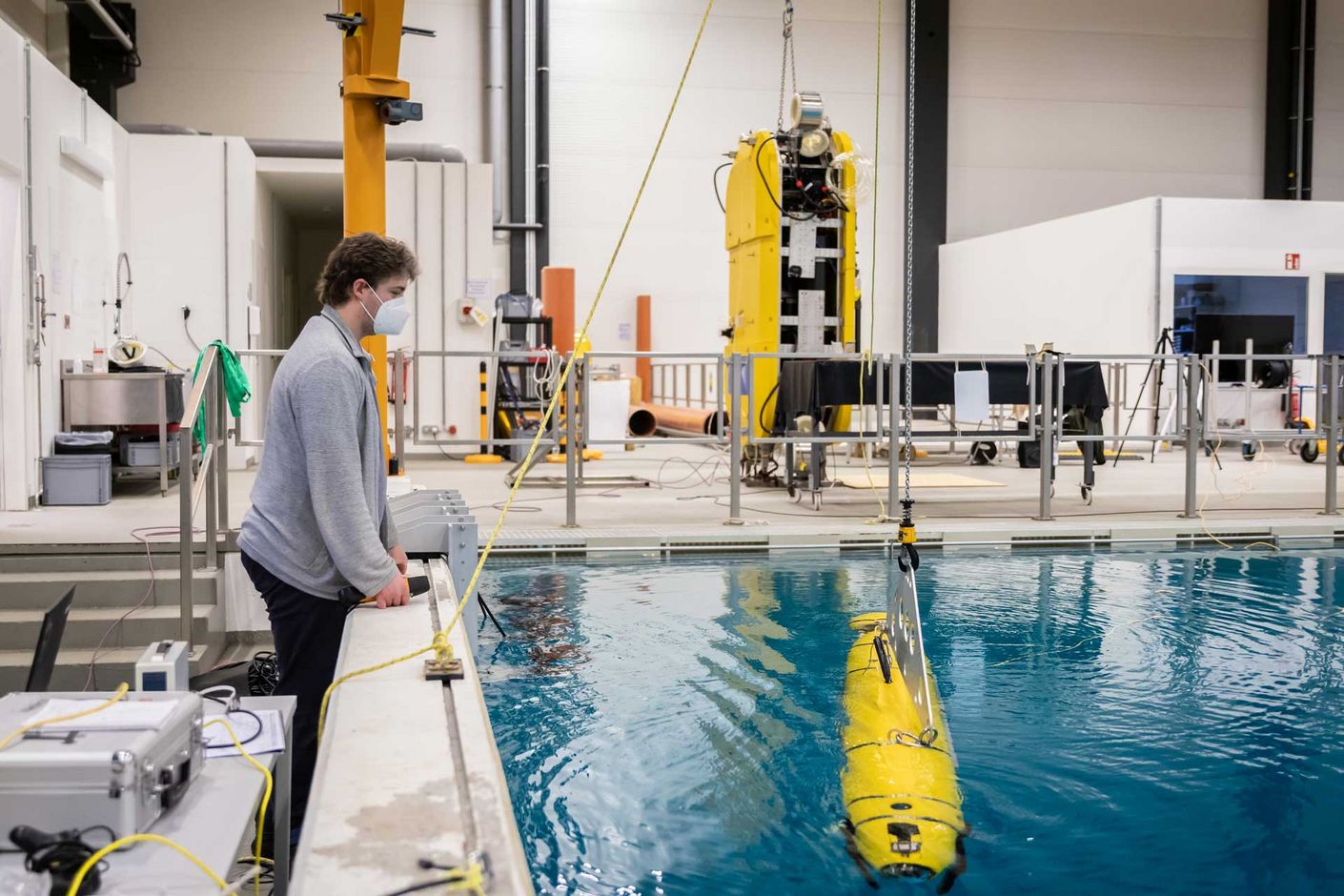
Um Müll aus der Tiefsee zu bergen, sei viel Geld und technisch hochentwickeltes Gerät notwendig, sagt Marc Hildebrandt. Von einem großen Ölbohrschiff aus, das am Tag 150 000 Euro kostet, Plastikmüll einzusammeln, hält er deshalb für ausgeschlossen: „Das wird keiner bezahlen und es wird niemals passieren.“ Was es braucht, seien einfachere Systeme, die autonom den Meeresboden absuchen und die autark vor Ort bleiben können, das heißt ohne die Infrastruktur eines großen Forschungsschiffes, von denen es in Deutschland ohnehin nur eine Handvoll gibt, zu benötigen.
Das Robotics Innovation Center (RIC) am DFKI Bremen, für das Hildebrandt seit 15 Jahren im Unterwasserteam arbeitet, ist auf Unterwasserrobotik spezialisiert. Es entwickelt mobile Roboter der nächsten Generation. Diese können komplexe Aufgaben selbstständig lösen und sicher mit dem Menschen kooperieren. DAGON ist eins von mehreren autonomen Unterwasserfahrzeugen, die in unterschiedlichen Forschungsprojekten am RIC im Einsatz sind, und wird derzeit für die Analyse von Meeresverschmutzungen erprobt. Dabei dient der Roboter als Trägersystem für die im Rahmen des Projektes MtecPla weiterentwickelte Monitoring-Technologie der PlanBlue GmbH. Diese kombiniert hyperspektrale und RGB-Bildgebung mit Unterwassernavigation und Künstlicher Intelligenz, um automatisiert und großflächig Plastik am Meeresgrund erkennen und bestimmen zu können. „Wenn wir die gewonnenen Bilder mit georeferenzierten Daten koppeln, können wir den Grad der Verschmutzung einschätzen, Veränderungen über einen Zeitraum feststellen und Reinigungsmaßnahmen planen“, sagt Marc Hildebrandt stellvertretend für das Projektteam, dessen Koordination bei PlanBlue liegt.
 © DFKI, Annemarie Popp
© DFKI, Annemarie Popp
 © DFKI, Annemarie Popp
© DFKI, Annemarie PoppMtecPla: Das Projekt MtecPla ist eingebettet in das ZIM-Kooperationsnetzwerk (Zentrales Innovationsprogramm Mittelstand) Plastik-Monitoring in europäischen Gewässern (PlaMoWa Europa). Koordiniert wird es von der PlanBlue GmbH. Zu den weiteren Projektpartnern zählen neben dem DFKI die Universität Stuttgart (Institut für Biomaterialien und biomolekulare Systeme) sowie die Kurt Synowzik Werkzeug u. Maschinenbau GmbH & Co. KG.
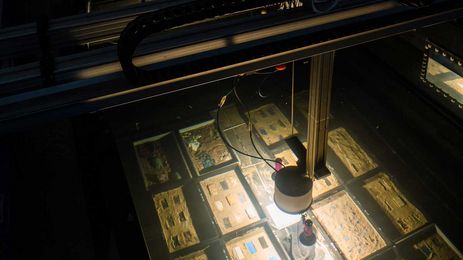
Insgesamt vier Wochen verbringen die Kolleginnen und Kollegen von PlanBlue im vergangenen Jahr am RIC in Bremen und nutzen dort das sogenannte schwarze Becken der Maritimen Explorationshalle. Es hat ein Fassungsvermögen von 20 m², ist 2,20 Meter tief und lässt sich komplett eintrüben. Die Dunkelheit simuliert die Bedingungen in der lichtlosen Tiefsee, wo nur das Eigenlicht der Unterwasserfahrzeuge und Kameras das Wasser erhellt. In jenes kleine Testbecken werden Proben eingebracht, die den Plastikmüll simulieren. Der Portalkran des RIC, der sich in drei Richtungen bewegen lässt und mit einer Dreheinrichtung modifiziert wurde, simuliert die Tauchenden, die die Monitoring-Technologie führen.
 © PlanBlue
© PlanBlue © PlanBlue
© PlanBlue © PlanBlue
© PlanBlueDass die so erprobte Technologie auch mit Robotern wie DAGON in einer natürlichen Umgebung funktioniert, konnten die Partner kürzlich bei abschließenden Tests im Kreidesee im niedersächsischen Hemmoor zeigen. Dank der Kombination mit Tauchrobotik soll es in Zukunft sogar möglich sein, Müll in der Tiefsee und am Meeresboden zu visualisieren. Das Knowhow aus dem RIC hilft dabei sicherzustellen, dass der abzusuchende Bereich vollständig erfasst wird.
Plastik in Gewässern spielt auch im 50 Kilometer entfernten Oldenburg eine entscheidende Rolle,
… wobei der Müll nicht in den Tiefen des Meeres, sondern an der Wasseroberfläche von Kamerasensoren erfasst wird. Die Kameras hängen zum Beispiel an Drohnen, die vermüllte Gewässer befliegen, oder kleben unter Brücken. Im DFKI Niedersachsen, wo Oliver Zielinski den Forschungsbereich Marine Perception leitet, verantwortet der Wissenschaftler Mattis Wolf mehrere Plastikmüll-Detektions-Projekte, deren Fokus auf verschmutzten Flüssen liegt.
Plastik in Südostasien: In Südostasien befinden sich die meisten der zehn Flüsse, die für einen Großteil des Plastikeintrages weltweit verantwortlich sind. Zu den Ursachen zählt auch, dass die Müllsammlung und Entsorgung Teile der Bevölkerung nicht erreicht oder Mülldeponien teils direkt neben Flüssen liegen, wo sie unzureichend abgeschirmt sind. Wobei Asien nicht alleinverantwortlich ist, solange westliche Industrienationen ihren Plastikmüll, darunter auch Deutschland, das einen Großteil nach Malaysia verschifft, nach Asien exportieren und so zum Problem beitragen.
Kambodscha ist das erste Land, in dem das DFKI 2019 zusammen mit der Weltbank und der lokalen Regierung ein Projekt zur Verbesserung der Abfallwirtschaft in den Städten Siem Reap und Sihanoukville startet. Später kommen Myanmar, Vietnam und die Philippinen hinzu. Mittlerweile wird das System auch in Europa eingesetzt, unter anderem in Deutschland auf der Insel Spiekeroog nach den jährlichen Sturmfluten oder zuletzt im Ahrtal nach der verheerenden Flutkatastrophe im Juli 2021. Egal, ob Asien oder Europa: In allen genannten Regionen erhält das DFKI Bilddaten, die es mit Hilfe von künstlichen, durch das Zusammenwirken von Mensch und Maschine trainierten neuronalen Netzwerken analysiert.
Auf der Grundlage der gewonnenen Bilddaten entwickelt Mattis Wolf einen Algorithmus für ein KI-Modell, mit dem sich die Menge sowie die Art des Mülls bestimmen lassen. Die Auswertung wird zurückgespielt an die zuständigen Behörden vor Ort. In Kambodscha zum Beispiel werden daraufhin Aktionspläne entworfen, mit denen die Regierung die Müllmenge bis zum Jahr 2025 deutlich reduzieren will.
 © © DFKI, Simone Wiegand
© © DFKI, Simone WiegandDas Labeln der Bilddaten: Bilder und Videos von Plastikmüll werden im DFKI in Oldenburg gelabelt. Das heißt, dass die Bilder in unzählige kleine Kacheln zerteilt und einem Katalog zugeordnet werden, in dem zuvor festgelegt wurde, was auf der jeweiligen Kachel zu sehen ist. Flaschen sind relativ gut zu labeln, weil sie sehr oft vorkommen, bei Deckeln und anderen Plastikartikeln, die weniger oft erfasst werden, ist es schon schwieriger. Am Ende müssen alle Plastikbehältnisse ausgewogen in den Daten vorhanden sein, mit denen das Modell trainiert wird. Nur so kann die KI dann Becher, Tüten, Lebensmittelverpackungen oder Transportbehältnisse sicher voneinander unterscheiden und zuverlässige Ergebnisse liefern.
Bisher erhielt das DFKI seine Daten aus der Luft und wertete diese in Oldenburg aus. Das Projekt AILHA, das Mattis Wolf leitet, geht nun einen Schritt weiter: Es will Bilddaten auf einem Müllsammelboot nicht nur generieren, sondern diese auch in Echtzeit auswerten. Dazu wird eine Kamera auf dem Förderband des Bootes installiert, über das der schwimmende Unrat an Bord gelangt. Die Bilder sendet die Kamera anschließend ins Führerhaus auf einen Laptop, wo sie mit Hilfe der KI ausgewertet werden.
AILHA: Das Projekt AILHA (AI enhanced Litter Harvester) verfolgt das Ziel, Müll aus Gewässern der Welt zurückzugewinnen und die Rohstoffe der Kreislaufwirtschaft wieder zuzuführen, zum Beispiel durch Recyclingverfahren vor Ort.
Der Steuernde des Boots soll später in Echtzeit Summen erhalten, wieviel Plastik sich im Müll befindet beziehungsweise um welche Plastikart es sich handelt, also zum Beispiel 10.000 Flaschen, 5.000 Deckel, 100.000 Stück Holz. Die Daten können beim Entladen direkt an den Abfallwirtschaftsbetrieb weitergeben werden, der damit verlässliche Zahlen über die Menge von Brennbarem oder Wertstoffen, die recycelt werden können, erhält. „Um diese Informationen später autonom zu generieren, nutzen wir die Methoden des maschinellen Lernens als Teil der KI“, erläutert Mattis Wolf: „Das System lernt mit unserer Anleitung, Müll auf dem Förderband voneinander zu unterscheiden und Mengen zu bestimmen.“
In AILHA arbeitet das DFKI zusammen mit Partnern. Einer von ihnen ist der Maschinenbauer Berky, der Spezialboote baut. Auf seinem Firmengelände im norddeutschen Haren an der Ems hat Berky ein Testbecken, 30 Meter lang, vier Meter tief. Das jüngste Müllsammelboot, das später auf den Namen Moringa by Landmarken getauft wird, macht an einem Tag im November einen Testlauf. Als der Bootsführer den Motor startet, schüttet ein Mitarbeiter einen gelben Sack voll vorbereitetem Plastikmüll ins Wasser. Der Wind bläst heftig und treibt die leichten Verpackungen schnell in die Ecken des Beckens, doch nach ein paar Manövern hat der Bootsführer alles an Deck befördert.
Der Maschinenbauer Berky: Berky ist ein mittelständischer Allrounder rund um eine umweltschonende Gewässerpflege. Er blickt auf eine 58-jährige Firmengeschichte zurück und baut heute von selbstfahrenden Mähmaschinen bis hin zu Mäh-, Sammel- und Baggerbooten jährlich rund hundert Maschinen für Kunden in der ganzen Welt. Im März 2020 baute Berky sein erstes Müllsammelboot. Mittlerweile sind mehrere, verschieden große Boote weltweit im Einsatz. Geschäftsführer Felix Knoll, dessen Großvater einer der drei Gründer von Berky war, sagt: "Immer mehr Menschen sind bereit, Geld zu investieren, damit weniger Müll in die Flüsse gelangt. Das ist kein Greenwashing, um sein Gewissen zu erleichtern, sondern der echte Wille, Gewässer zu säubern. Diesen Weg wollen wir mitgehen, denn wir haben das Potential, unseren Beitrag zu leisten und in der Welt etwas zu ändern.”
Das Müllsammelboot ist nach einer 50-tägigen Reise auf dem Seeweg in Phnom Penh in Kambodscha angekommen. Dort wird es seither tagtäglich im Mekong, einem der zehn verschmutzen Flüsse weltweit, und seinen Zuflüssen eingesetzt. Geleitet wird die Cleanup Mission von everwave, seit langem Partner des DFKI Niedersachsen. Kambodscha ist für everwave zwar der erste Einsatz in Südostasien, aber längst nicht das erste erfolgreiche Cleanup, das das engagierte Team in Kooperation mit dem DFKI durchführt.
 © © ewerwave
© © ewerwaveeverwave: Das Start-up aus Aachen, das vormals unter dem Namen Pacific Garbage Screening arbeitete, setzt sich für einen ganzheitlichen Ansatz für plastikfreie Meere und Gewässer ein. Hinter everwave stehen Wissenschaftler*innen, Ingenieur*innen, Architekt*innen und Meeresliebhaber*innen.
Mit einem weiteren Müllsammelboot, genannt CollectiX, sorgt die everwave-Crew beispielsweise im Frühjahr des vergangenen Jahres in Bosnien-Herzegowina für Aufsehen. Im Grenzfluss Drina, in der Nähe der Stadt Visegrád, haben sich im März 2021 Tonnen von Abfall wie Plastik, Kühlschränke und Autoreifen vor einem Wasserkraftwerk gestaut. Clemens Feigl, einer der Mitbegründer von everwave erklärt damals: „Für unseren Einsatz hier spielt die KI eine große Rolle. Sie hilft uns zu erkennen, wo sich welche Art von Müll befindet und wir unser Boot effizient einsetzen müssen.“
„Das Meer und auch seine Widerstandskraft sind endlich“, sagt Oliver Zielinski, der 2020 das Kompetenzzentrum „KI für Umwelt und Nachhaltigkeit“, kurz DFKI4planet, gegründet hat. Dort will er Arbeiten am DFKI bündeln und vorantreiben. Sie sollen zum einen die KI selbst nachhaltiger gestalten, zum anderen aber auch KI-Methoden für mehr Nachhaltigkeit entwickeln und damit direkt auf die Nachhaltigkeitsziele der UN einzahlen. Wenn man es schaffe, KI in der Zukunft möglichst effektiv für den Schutz von Umwelt und Klima einzusetzen, sagt Zielinski, „dann kann sie in der Tat ein Stück dazu beitragen, den Planeten zu retten.“
Die Nachhaltigkeitsziele der UN: KI-Methoden, wie sie in Bremen und Oldenburg für den Schutz des Meeres entwickelt werden, zahlen direkt auf die globalen Nachhaltigkeitsziele ein, die von den Vereinten Nationen im Rahmen der Agenda 2030 im Jahr 2015 in New York beschlossen wurden. Nummer 14 von insgesamt 17 Zielen lautet: Leben unter Wasser. Die Bundesregierung hat sich auf ihre Fahnen geschrieben, bis zum Jahr 2025 alle Arten der Meeresverschmutzung und Nährstoffbelastung erheblich einzudämmen. Die wissenschaftlichen Kenntnisse sollen dafür vertieft, die Forschungskapazitäten ausgebaut und die Meerestechnologien weitergegeben werden.
Die Meeresoffensive: Die Bundesregierung hat Anfang 2022 eine Meeresoffensive für saubere Ozeane, den Schutz mariner Artenvielfalt und gegen Meeresmüll beschlossen. Sie soll in den kommenden Jahren alle Aspekte des Meeresschutzes in einer Meeresstrategie bündeln und den Schutz des Meeres mit einer umweltverträglichen Nutzung in Einklang bringen.
Kontakt
Simone Wiegand
Unternehmenskommunikation Niedersachsen
simone.wiegand@dfki.de