2025 soll es so weit sein: Dann will die Europäische Weltraumorganisation ESA die erste Demonstrationsmission für sogenannte In-Situ Resource Utilization (ISRU) zum Mond starten. Mit Hilfe von ISRU-Technologien können auf fremden Planeten vorhandene Rohstoffe genutzt werden, um daraus für Raumfahrtmissionen benötigte Ressourcen wie Trinkwasser, Sauerstoff oder Baumaterialien für menschliche Habitate herzustellen, die sonst aufwendig von der Erde mitgebracht werden müssten. Dadurch lassen sich nicht nur immense Kosten einsparen. Die Technologien sind zudem von großer Bedeutung, wenn es um eine nachhaltige Erforschung des Weltraums geht. Bei deren Aufbau und Montage werden robotische Systeme eine entscheidende Rolle spielen.
Basistechnologien für die robotische Zusammenarbeit auf dem Mond
Zur Vorbereitung zukünftiger Einsätze von Menschen auf fremden Planeten müssen Roboter in der Lage sein, autonom im Team zu operieren, um komplexe Aufgaben wie die Durchführung wissenschaftlicher Untersuchungen oder den Aufbau von Infrastruktur zu bewältigen. Ziel des im Februar 2019 gestarteten Projekts Pro-Act war es, dafür notwendige Basistechnologien zu entwickeln und deren Funktionsfähigkeit in einem lunaren Missionsszenario zu demonstrieren. Die Europäische Kommission förderte das Vorhaben in der zweiten Phase des Strategic Research Clusters (SRC) „Space Robotics Technologies“ als Teil der PERASPERA-Aktivität im Rahmen des Horizon 2020-Programms. Mit seiner langjährigen Expertise auf dem Gebiet der Weltraumrobotik gehörte das Robotics Innovation Center des DFKI zu dem von der belgischen Firma Space Applications Services geleiteten Projektkonsortium, das sich aus insgesamt neun europäischen Unternehmen und Institutionen aus sechs verschiedenen Ländern zusammensetzte.
Ungleiches Roboter-Team kooperiert beim Aufbau einer ISRU-Anlage
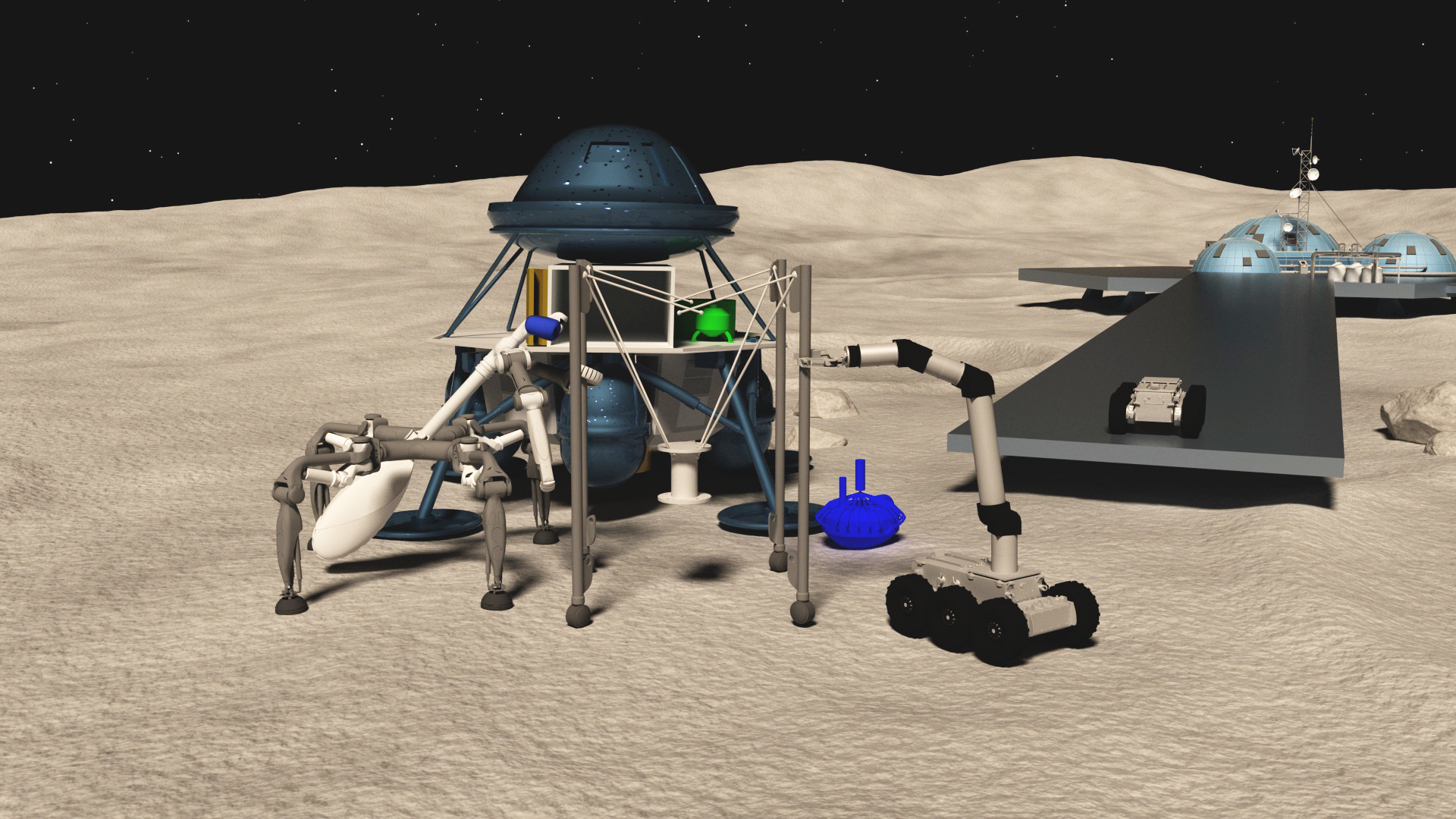
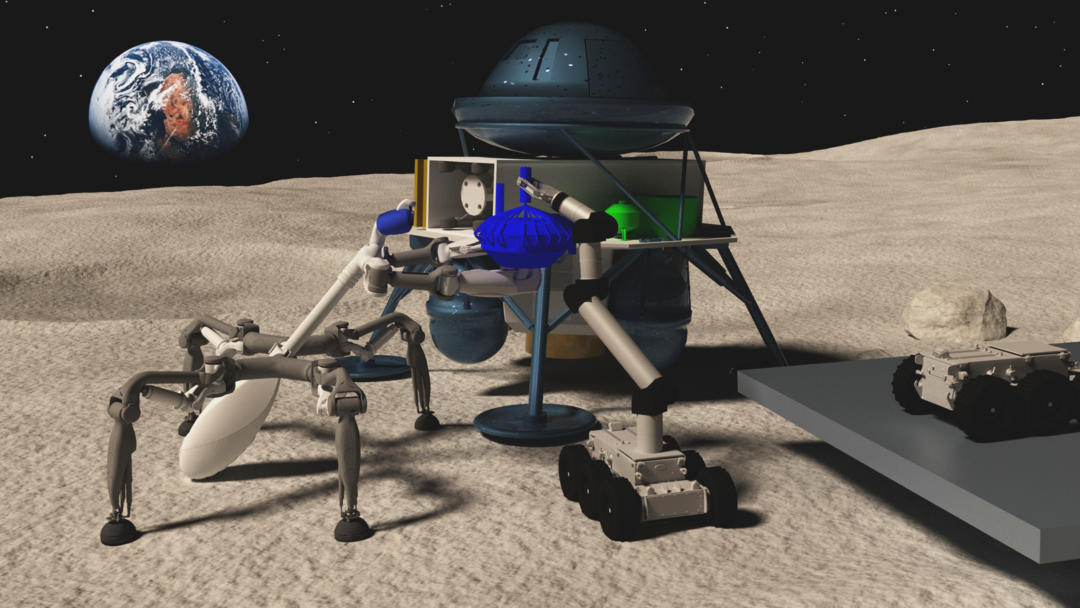
Im Mittelpunkt des Vorhabens stand die Zusammenarbeit drei verschiedenartiger Robotersysteme – dem sechsbeinigen Laufroboter „Mantis“ des DFKI, dem Rover „VELES“ von der polnischen Firma PIAP Space und dem mobilen Portal der spanischen Firma AVS – deren gemeinsames Ziel es ist, eine ISRU-Anlage mit unterstützender Infrastruktur aufzubauen. Dafür kombinierte das ungleiche Team seine Stärken: Der Laufroboter Mantis zeichnet sich dank seiner sechs Extremitäten, von denen er die zwei vorderen auch zur Manipulation einsetzen kann, durch einen hohen Grad an Flexibilität aus und meistert selbst schwieriges Terrain. Der Rover VELES ist in der Lage, größere Wegstrecken zu überwinden und mithilfe seines Greifarms besonders schwere Nutzlasten zu transportieren. Das mobile Portal, das sich mit der Unterstützung von Mantis und VELES auseinanderziehen lässt, verfügt über einen integrierten 3D-Drucker, den es mithilfe einer Seilsteuerung bewegen kann. In Pro-Act wurde das Ausdrucken von Bauteilen für die Montage der ISRU-Anlage unter Verwendung des auf dem Mond vorhandenen Regoliths simuliert. Um die autonome Kooperation der drei Roboter zu ermöglichen, entwickelten die Projektpartner die aus den Vorgängerprojekten des SRC hervorgegangen Software- und Hardwaretechnologien weiter und passten diese missionsspezifisch an. Durch kooperative Zielzerlegung, kollaborative Missionsplanung und Manipulation gelang es den Systemen, gemeinsam verschiedene Aufgaben zu bewältigen.
DFKI trägt wichtige Hardware- und Softwarelösungen bei / Trotz Corona ein Erfolg
Neben der software- und hardwareseitigen Weiterentwicklung und Anpassung von Mantis an das Missionsszenario gehörte die Bereitstellung einer Simulationsumgebung zu den Aufgaben des Robotics Innovation Center. Diese erlaubte es den Partnern ihre Software zunächst auf Robotersimulationen zu testen, bevor diese auf den ‚realen‘ Systemen implementiert wurde. So konnten Programmfehler schon frühzeitig erkannt und behoben werden. Zudem entwickelten die Bremer Forschenden Schnittstellen, die den Einsatz der Partnersoftware auf Mantis ermöglichten. In der Weltraumexplorationshalle des DFKI sollte die Zusammenarbeit der Roboter schließlich erprobt werden. Diese Pläne wurden jedoch von der Corona-Pandemie durchkreuzt: Bereits zu den ersten gemeinsamen Tests im September 2020 konnten nicht alle Partner anreisen, und auch das Roboter-Team blieb unvollständig. Die Abschlusstest im März 2021 mussten dann komplett virtuell via Remoteverbindung realisiert werden, was vor allem im Hinblick auf die Roboterkooperation weitere Herausforderungen wie instabile Internetverbindungen und zeitliche Delays mit sich brachte. Trotz alldem gelang es den Partnern, erfolgreich zu demonstrieren, wie Mantis und VELES bei der Erstellung von Umgebungskarten und dem Transport von Bauelementen zusammenarbeiten. Darüber hinaus sammelten sie umfangreiche Erfahrungen auf dem Gebiet der Teleoperation, die für künftige planetare Weltraummissionen von großem Nutzen sind.
Pro-Act-Projektpartner:
- Space Applications Services NV, Belgien – Konsortialführer
- Deutsches Forschungszentrum für Künstliche Intelligenz (DFKI), Robotics Innovation Center, Deutschland
- GMV Aerospace and Defence SA, Spanien
- Przemyslowy Instytut Automatyki i Pomiarow PIAP, Polen
- Centre National de la Recherche Scientifique CNRS, Frankreich
- City, University of London, Großbritannien
- AVS added Value Industrial Engineering Solutions SLU, Spanien
- La Palma Research Centre for Future Studies SL, Spanien
- Thales Alenia Space, Großbritannien
DFKI im Strategic Research Cluster „Space Robotics Technologies” der Europäischen Kommission
Im Rahmen des Strategic Reserach Clusters (SRC) „Space Robotics Technologies“ fördert die Europäische Kommission Kerntechnologien für eine neue Generation von Weltraumrobotern mit dem Ziel, die orbitale und planetare Erforschung unseres Sonnensystems voranzutreiben. Die neuen Technologien sollen sowohl beim Aufbau modularer und rekonfigurierbarer Satellitensysteme als auch bei der Erforschung von Mars, Mond und anderen Himmelskörpern zum Einsatz kommen. Das DFKI Robotics Innovation Center unter Leitung von Prof. Dr. Dr. h.c. Frank Kirchner ist Partner des „PERASPERA (ad ASTRA)“-Konsortiums, das die strategischen Ziele des SRC plant und in Teilprojekten, sogenannten Operational Grants (OG) umsetzt. In den ersten zwei Förderphasen (2016–2019 u. 2019–2021) war der DFKI-Forschungsbereich an sieben der insgesamt elf OGs beteiligt. In der dritten und letzten Förderphase des SRC leitet das Robotics Innovation Center das im März 2021 gestartete Projekt CoRob-X, in dem es gemeinsam mit europäischen Partnern erforscht, wie ein Team aus mehreren Robotern bei der Erkundung von Lavahöhlen auf dem Mond kooperieren kann. Zudem ist das DFKI in das Vorhaben PERIOD involviert, in dem es darum geht, ein orbitales Demonstrationskonzept für On-Orbit Servicing zu definieren und den Reifegrad der dafür notwendigen Technologien zu erhöhen.
Mehr Informationen
Projektwebsite: https://www.h2020-pro-act.eu/
Pro-Act auf dfki.de: https://www.dfki.de/web/forschung/projekte-publikationen/projekte-uebersicht/projekt/pro-act-og11/
Videos zum Projekt
DFKI-Wissenschaftlerin Wiebke Brinkmann erklärt Pro-Act aus DFKI-Perspektive: https://youtu.be/j2PA40GTsfs
Die Animation zeigt das Pro-Act-Missionsszenario: https://www.youtube.com/watch?v=jNNgcgPyEO8&t=88s
Das Video zeigt die Projektziele und -ergebnisse: https://www.youtube.com/watch?v=eVK68jOOuk4