Autonome Fahrzeuge werden ein unverzichtbarer Bestandteil zukünftiger Mobilitätssysteme sein. Mit autonomen Fahrzeugen lässt sich die Sicherheit des Fahrens bei gleichzeitiger Steigerung der Verkehrsdichte signifikant erhöhen. Autonom agierende Fahrzeuge müssen in der Lage sein, ihre Umwelt und Bewegungen anderer Verkehrsteilnehmer kontinuierlich und genau zu erfassen. Hierzu müssen neuartige echtzeitfähige Sensorsysteme erforscht werden. Kameras und Laserscanner funktionieren nach unterschiedlichen Prinzipien und bieten unterschiedliche Vorteile bei der Erfassung der Umwelt. Im Rahmen dieses Projekts soll erforscht werden, ob und wie die beiden Sensorsysteme kombiniert werden können, um damit Bewegungen im Verkehr in Echtzeit zuverlässig zu erfassen. Die Herausforderung besteht in diesem Fall darin, die heterogenen Daten beider Systeme geeignet zu verknüpfen und geeignete Repräsentationen für die geometrischen und visuellen Merkmale einer Verkehrsszene zu finden. Diese müssen so weit optimiert werden, dass zuverlässige Informationen für die Fahrzeugsteuerung in Echtzeit bereitgestellt werden können. Wenn es gelingt, ein solches Hybridsensorsystem zu konzipieren und erfolgreich aufzubauen, könnte dies einen Durchbruch für die Sensorausstattung autonomer Fahrzeuge darstellen und einen entscheidenden Schritt für die Umsetzung dieser Technologie bedeuten.

Projekt | FUMOS
Laufzeit:
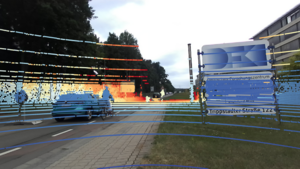
Fusion multimodaler optischer Sensoren zur 3D Bewegungserfassung in dichten, dynamischen Szenen für mobile, autonome Systeme
Forschungsthemen
Anwendungsfelder
Kontakt
Ramy Battrawy, M.Sc.- Ramy.Battrawy@dfki.de
- Tel.: +49 631 20575 3690
- Rene.Schuster@dfki.de
- Tel.: +49 631 20575 3605
Keyfacts
Publikationen
Alle PublikationenFördergeber
BMBF - Bundesministerium für Bildung, Wissenschaft, Forschung und Technologie
13N16302
