
Dr.-Ing. Malte Langosz
Organizational unit
Robotics Innovation Center
Address
(Bremen)
Robert-Hooke-Straße 128359 Bremen
Publications
All publicationsProfile
RoX
Verbundprojekt: Digitales Ökosystem für Kl-basierte Robotik (RoX) - Teilvorhaben: Nutzung von Kl-Methoden zur Optimierung von robotischen FähigkeitenIn September 2024, the joint project "RoX," funded by the Federal Ministry for Economic Affairs and Climate Action (BMWK), officially started. The goal of the project is to establish a digital…

NoStrandAMust
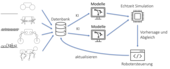
NoStrandAMust - Bodenkontaktsimulation zur Verbesserung der Lokomotionsperformance mobiler RoboterNoStrandAMust is a project with the goal of experimentally investigating the ground interaction of different robots and generating models for the interaction using AI methods. These models are to be…
KiMMI SF
Adaptive software framework for context-sensitive, intuitive man-machine-interactionThe aim of project "KiMMI SF" is the development of a software framework for flexible and context-optimized man-machine-interaction. On the one hand, this shall offer online reconfigurable data…
