
Dr.-Ing. Malte Wirkus
Organizational unit
Robotics Innovation Center
Address
(Bremen)
Robert-Hooke-Straße 128359 Bremen
Publications
All publicationsProfile
FieldCoBots
KMU-innovativ Verbundprojekt: Heterogene Feldrobotik für die Erdbeerernte (FieldCoBots); Teilprojekt: Verwaltung hybrider Mehrrobotersysteme im Zusammenspiel mit menschlichen AkteureGlobal competition in fruit production and the local shortage of harvest workers require innovative autonomous robotic systems that work together with humans. For some crops, a largely automated…
NoStrandAMust
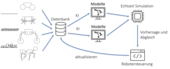
NoStrandAMust - Bodenkontaktsimulation zur Verbesserung der Lokomotionsperformance mobiler RoboterNoStrandAMust is a project with the goal of experimentally investigating the ground interaction of different robots and generating models for the interaction using AI methods. These models are to be…
ROLAND
ROLANDThe aim of the project is to design and develop a semi-autonomous, mobile system that is capable of harvesting fruit independent of human interaction. While robotic systems are currently used mainly…

RoBivaL
Roboter Bodeninteraktionsevaluierung in der LandwirtschaftIm Rahmen des RoBivaL-Projekts werden verschiedene Roboter-Lokomotionskonzepte aus der Weltraumforschung und aus landwirtschaftlichen Anwendungen anhand von Experimenten, die unter Agrar-Bedingungen…

ESROCOS
European Space Robot Control Operating SystemThe goal of the ESROCOS project is to provide an open source framework which can assist in the development of flight software for space robots. By providing an open standard which can be used by…
