
Dr.-Ing. Malte Wirkus
Organisationseinheit
Robotics Innovation Center
Adresse
(Bremen)
Robert-Hooke-Straße 128359 Bremen
Publikationen
Alle PublikationenProfil
FieldCoBots
KMU-innovativ Verbundprojekt: Heterogene Feldrobotik für die Erdbeerernte (FieldCoBots); Teilprojekt: Verwaltung hybrider Mehrrobotersysteme im Zusammenspiel mit menschlichen AkteureDer globale Wettbewerb in der Obstproduktion und der lokale Mangel an Erntehelfern erfordern innovative autonome Robotersysteme, die mit dem Menschen zusammenarbeiten. Bei einigen Kulturen ist eine…
NoStrandAMust
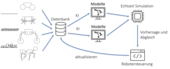
NoStrandAMust - Bodenkontaktsimulation zur Verbesserung der Lokomotionsperformance mobiler RoboterBei NoStrandAMust handelt es sich um ein Vorhaben mit dem Ziel, die Bodeninteraktion von unterschiedlichen Robotern experimentell zu untersuchen und mittels KI-Methoden Modelle fur die Interaktion zu…
ROLAND
Robotik in der LandwirtschaftZiel des Vorhabens ist die Konzeption und Entwicklung eines teilautonomen, mobilen Systems, welches in der Lage ist, selbstständig Obst zu ernten. Während robotische Systeme aktuell vor allem in…

RoBivaL
Roboter Bodeninteraktionsevaluierung in der LandwirtschaftIm Rahmen des RoBivaL-Projekts werden verschiedene Roboter-Lokomotionskonzepte aus der Weltraumforschung und aus landwirtschaftlichen Anwendungen anhand von Experimenten, die unter Agrar-Bedingungen…

ESROCOS
European Space Robot Control Operating SystemDas Ziel des Projekts ESROCOS ist es, ein Open-Source-Framework zur Verfügung zu stellen, das die Entwicklung von Software für Weltraumroboter unterstützen kann. Durch die Bereitstellung eines offenen…
